13.1 Object and parameter dependencies
Depending on the object 0x6060 Modes of Operation the used objects and parame-
ters differ. Because the different objects and parameters are used they can and
be set individually.
Using the Deceleration and Quick Stop is depends
on the actual mode of operation,
control commands and error reaction to communication errors (see object
0x6007/0
abort connection option code
).
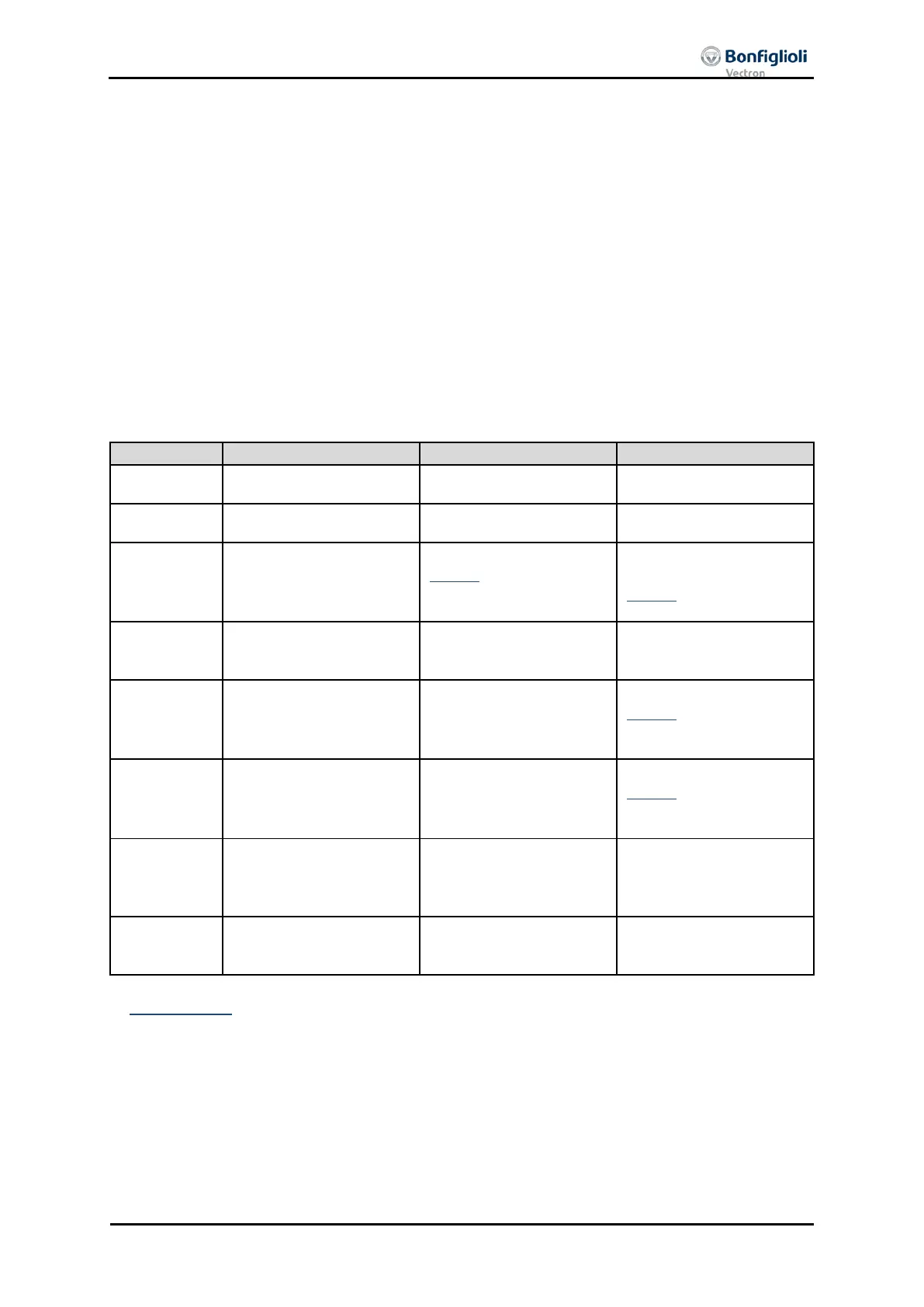
The following tables contain an overview of the different used objects and parame-
ters. The first mentioned object or parameter menti
oned in a cell is usually used. If an
object relates to a parameter, this parameter is mentioned.
Parameters 1292 Modes of Operation
and following
(1293, 1294, 1295, 1296 &
1297) are used to link internal functions to CANopen objects. Usually, these
need not
to be changed when using CANopen.
1)2)
ing Speeds
1132 & 1133
Default: 806 - Obj.
0x6042 Target Velocity
pv [u/s]
2)
Default: 816 - Obj.
Velocity min max amount
Velocity min max amount
Velocity min max amount
Acceleration
1134
Velocity acceleration
= 420 (&422)
Default :804 - Obj.
0x6083 Profile Accelera-
Acceleration
1134
Velocity deceleration
= 421 (& 423)
,
Default : 805 - Obj.
0x6084 Profile Decelera-
Quick stop deceleration
1179 Emergency
Quick Stop
= 424 (& 425)
Quick stop deceleration
1179 Emergency
Method
Homing method
1) Modes of Operation is selected via 1292 S.Modes of Operation.
Default setting: 801 - Obj. 0x6060
Modes of Operation.
2) Parameters 1285, 1292, 1293, 1294, 1295, 1296 & 1297 are used for the connection between
CANopen Objects and internal functions. For CANopen, these do not have to be changed.
3) The limitation is always restricted by 418
Minimum frequency and 419 Maximum frequency..
1118
Limitation of the Position controller in configuration x40 can result in a boost above maximum
frequency since the output of the Position Controller is added to the maximum frequency.
4) Quick Stop or Deceleration is used depending on Stopping behavior 630
Operation mode or Com-
munication fault reaction 0x6007/0
abort connection option code
.
04/13 CM-CAN ACU 155