reached
Bit 10
Halt = 0: home position not reached
Halt = 1: axle decelerates
Halt = 0: home position reached
Halt = 1: axle has velocity 0
tained
Homing mode carried out successfully
Bit 13
Homing error occurred
Homing mode carried out unsuccessfully
For an exact description of the various homing modes refer to the application manual
“Positioning”.
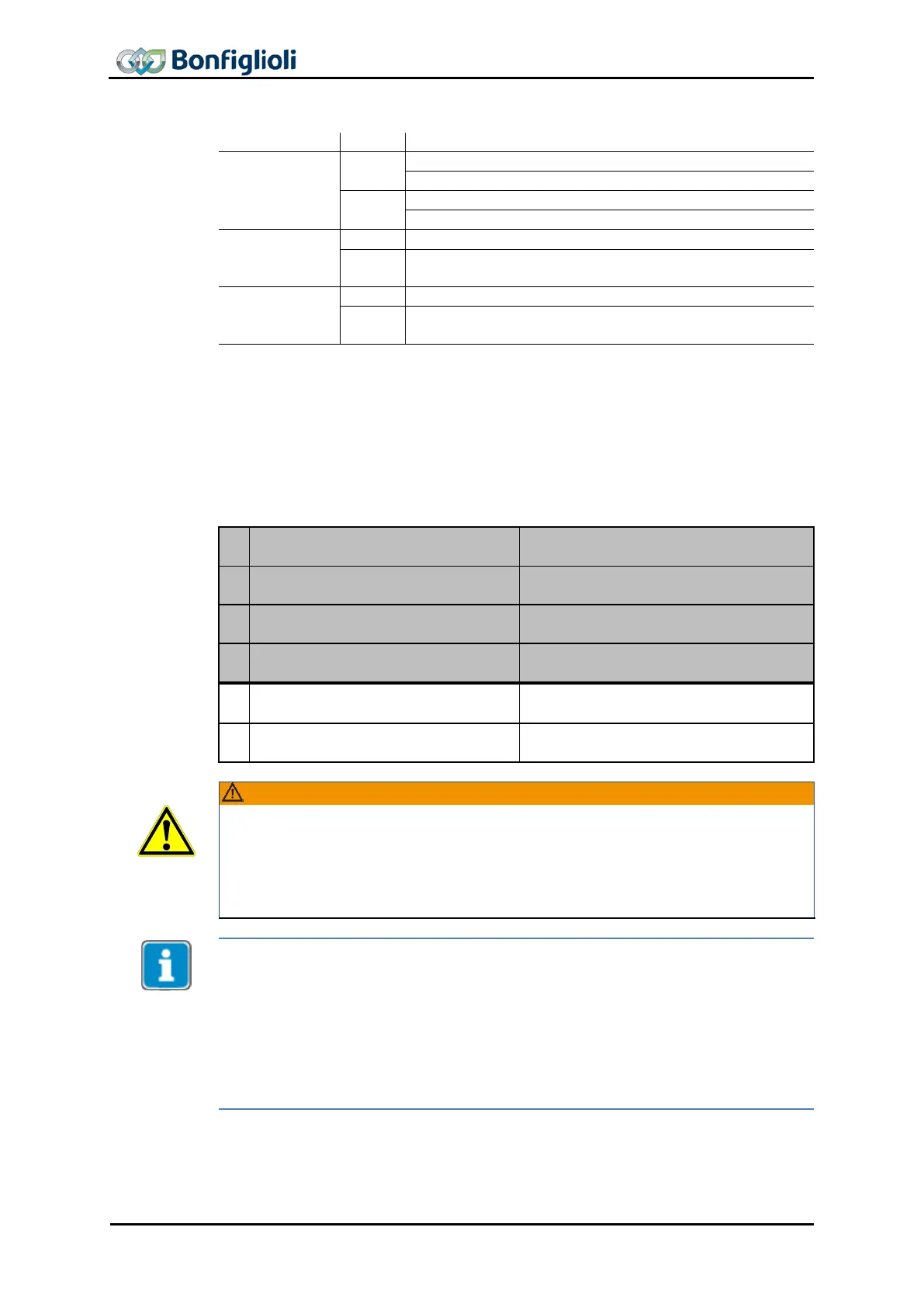
14.4.5.1 Example Sequence
To start the Homing mode, the correct sequence has to be sent from the PLC.
Enable Operation and start Homing.
Operation enabled and homing attained.
Dangerous state due to new mode!
•
When 0x6060
Modes of Operation
is changed during operation (Control word =
0xnnnF), a dangerous state can occur in the new mode.
Checking the status word before changing 0x6060
Modes of Operation
state 0xnn33).
After the sequence of the first four Control word s was processed correctly, the ACU is
enabled (dark marked table area).
In “Operation enabled” state (0xnnnF) the Motion Control states can be changed
(white marked area in table).
With the control word tr
ansition from 0xnnnF to 0x0007 the velocity mode is stopped.
After that it is possible to start again with 0xnnnF.
While 0x0007 is active, it is also possible to change the modes of operation without
any danger. After changing 0x6060
modes of operation
to another value you can start
the new operation mode with the according sequence.
202 CM-CAN ACU 04/13

 Loading...
Loading...






