12.5.5 0x6042/0 Target velocity [rpm]
• Motion Control:
o Velocity mode
• Non motion Control (conf. ≠ x40)
• Motion Control:
o Table Travel record mode
o Profile Positioning mode
o Profile Velocity mode
o Homing mode
o Interpolated mode
o Move away from Limit Switch
Object
target velocity
is the speed reference value for the frequency inverter.
Target
velocity
is interpreted as a speed with the unit RPM. The inverter's internal reference
frequency is calculated from the target velocity in RPM taking into account parameter
No. of Pole Pairs 373.
The parameter No. of Pole Pairs 373 has four different data sets. In motion control
applications (configuration = x40) only the data set 1 is used.
Non motion control applications (configuration ≠
x40) sometimes have more than one
motor connected to the inverter (only one at a time, switched over by contactor). Th
se motors may have a different no. of pole pairs. The entry in No. of Pole Pairs 373
then different in the four data sets. After change-over of the motor, the object
must be written at least once in order to recalculate the internal reference fr
e-
quency of the inverter using the correct no. of pole pairs.
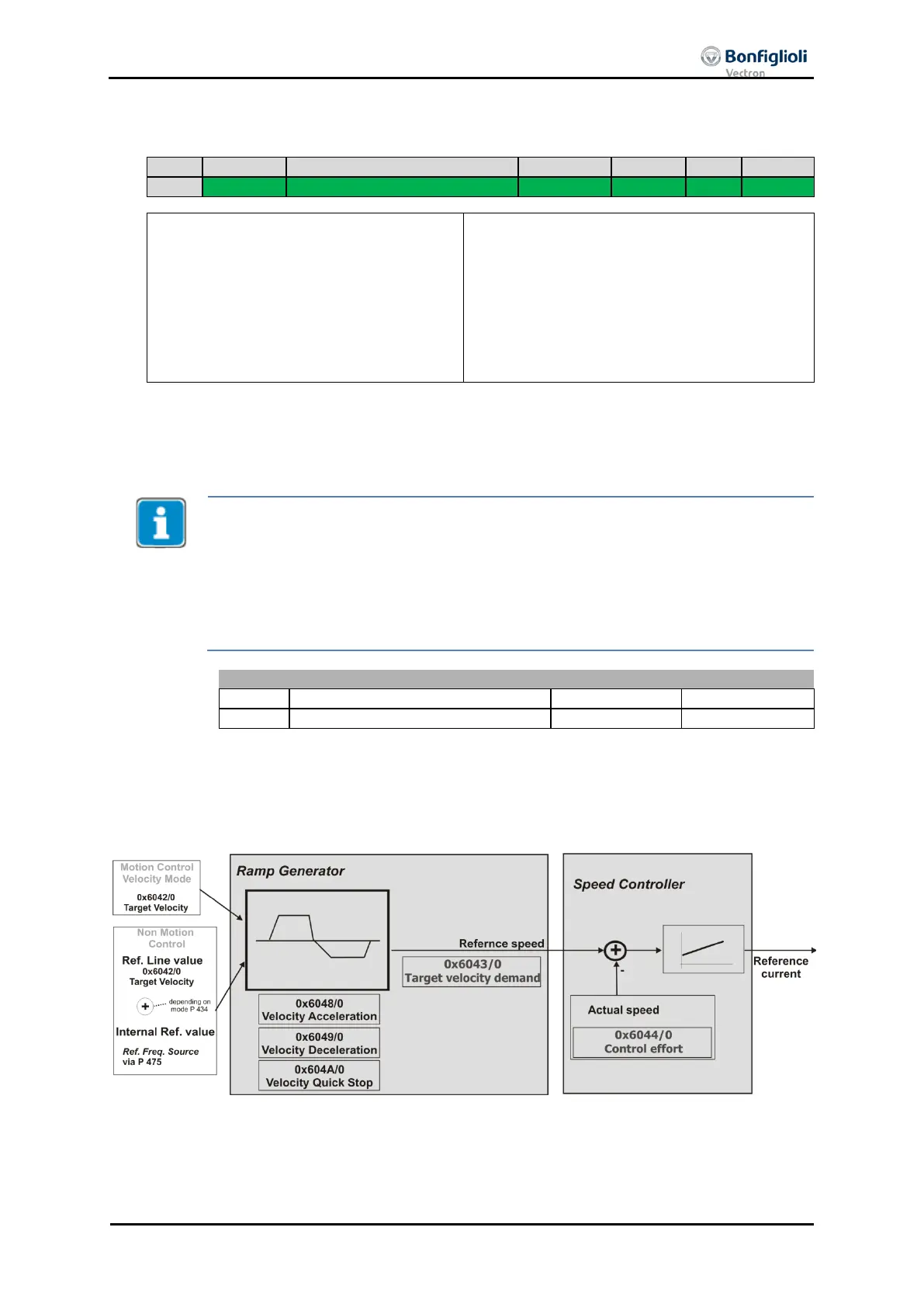
In Non motion Control configurations (conf. ≠ x40) the target velocity reference value
is product-internally connected to the Reference line value
. This reference value is
combined with the internal reference frequency value from the frequency reference
value channel in the input of the ramp function (see chapter 14.3.3 “
Reference value /
actual value”).
04/13 CM-CAN ACU 117

 Loading...
Loading...






