12.5.17 0x6067/0 Position window
0xFFFF FFFF
• Motion Control:
• Non motion Control (conf. ≠ x40)
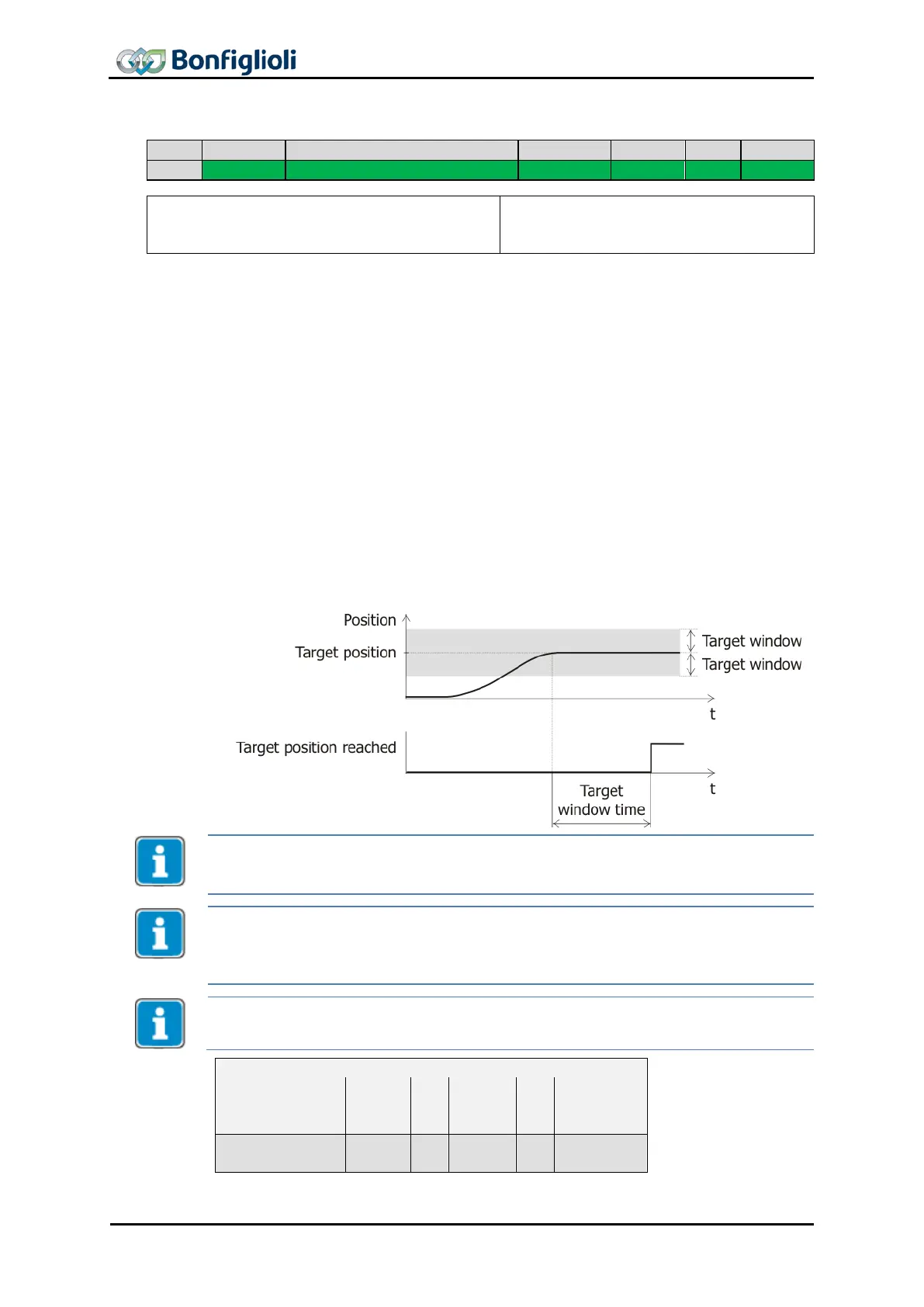
The signal “target position reached” can be changed in accuracy with Object 0x6067
position window
for the modes which use Status Word Bit 10 “Target reached” as
“Target Position reached” like “Profile Positioning Mode” and “Table Travel Record
Mode”.
Object 0x6067
position window
defines a symmetrical range of accepted positions
relative to the target position in user units. If the actual value of the position mea
s-
urement device is within the position window, the target position is regarded as
reached. “Target reached” is displayed in Bit 10 of the status word. The actual pos
tion must be inside the position window during the time specified in Object
position window time
.
If the actual position drifts outside the target window or if a new target position is set,
the “Target reached” Bit is reset until the position and time conditions are met again.
The valid value range of object 0x6067/0
position window
is 0 … 0x7FFF FFFF (2
31
-
Writing a value of 0x8000 0000 (2
31
)… 0xFFFF FFFE (2
32
-
2) results in an SDO abort
(value range).
If the value of
position window
is set to 0xFFFF FFFF (2
32
-1) OR 0, the position wi
n-
dow control is switched off.
Writing to object
position window
automatically generates a write command to parame-
ter Target Window 1165 (data set 5, all data sets in RAM only !).
If object 0x6067/0 was written and then a save parameters command (object 0x1010)
processed, the object value is stored in non volatile memory.
After the next power on of the inverter, the previously set value is reactivated and
overwrites the setting of Target Window 1165.
The dimension of the user units is defined by 0x6091
Gear ratio
and 0x6092
Feed con-
stant
.
CB: Control byte SI: Sub Index All values in hexadecimal without leading 0x
128 CM-CAN ACU 04/13

 Loading...
Loading...






