index
cess
map-
setting
ing.
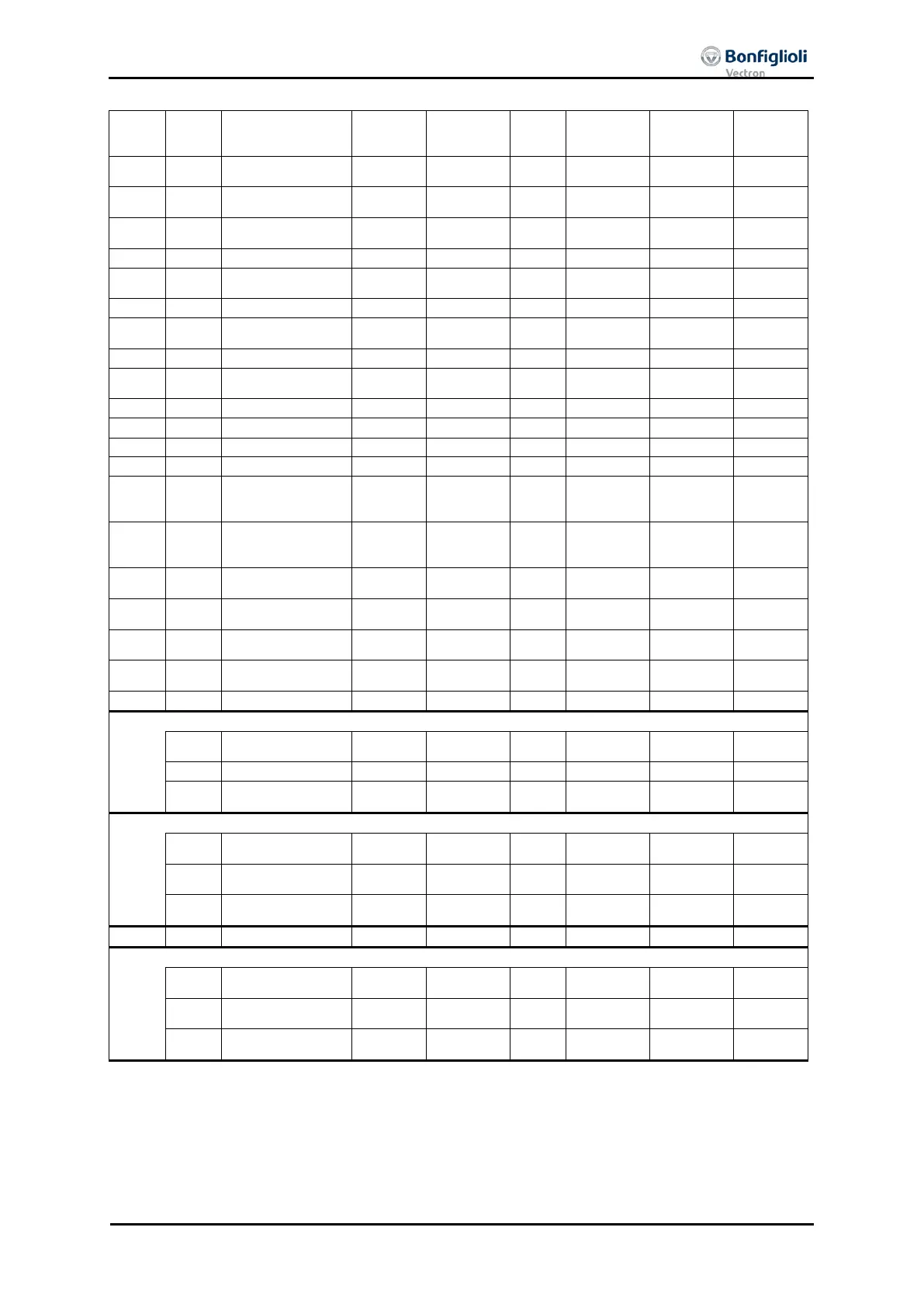
0x6065 0
Read/write Unsigned32 No 0xFFFF.FFFF
p.1105
0x6066 0
Read/write Unsigned16 No 10 0…65535 p.1119
0x6067 0 Position window Read/write Unsigned32 No 0xFFFF.FFFF
p.1165
0x6068 0 Position window time Read/write Unsigned16 No 10 0…65535 p.1166
0x606C 0
u)
Read Integer32 Tx
-
0x606D 0 Velocity Window
u)
Read/write Unsigned16 No 1000 0…65535 p.1276
0x606E 0
u)
Read/write Unsigned16 No 0 0…65535 p.1277
0x606F 0 Velocity Threshold
u)
Read/write Unsigned16 No 100 0…65535 p.1278
0x6070 0
u)
Read/write Unsigned16 No 0 0…65535 p.1279
0x6071 0 Target torque Read/write Integer16 Rx
-
0x6077 0 Torque actual value Read only Integer16 Tx
p.224
0x6078 0 Current actual value Read only Integer16 Tx
p.214
0x6079 0 DClink circuit voltage Read only Integer32 Tx
p.222
0x607A 0 Target position
p)
Read/write Integer32 Rx 0
…
p.1202
0x607C 0 Home offset
h)
Read/write Integer32 No 0
…
p.1131
0x6081 0 Profile velocity
p)
i)
u)
Read/write Unsigned32 Rx 0x0005.0000
0x6083 0
p)
i) u)
Read/write Unsigned32 Rx 0x0005.0000
0x6084 0
p)
i) u)
Read/write Unsigned32 Rx 0x0005.0000
0x6085 0
h) i) p)
t) u)
Read/write Unsigned32 No 0x000A.0000
p.1179
0x6086 0 Motion profile type
Read/write Integer16 No 3 0…3 -
0x6091 Gear ratio
0
Highest sub-index
supported
Read only Unsigned8 No - - -
1 Motor revolutions Read/write Unsigned32 No 1 1…65535 p.1116
2
(Driving) Shaft revo-
lutions
Read/write Unsigned32 No 1 1…65535 p.1117
0x6092 Feed constant
0
Highest sub-index
supported
Read only Unsigned8 No - - -
1 Feed Read/write Unsigned32 No 0x0001.0000
p.1115
2
(Driving) Shaft revo-
lutions
Read/write Unsigned32 No 1 1
0x6098 0 Homing method
h)
Read/write Integer8 No 0 0…35 p.1130
0x6099 Homing speeds
h) l)
0
Highest sub-index
supported
Read only Unsigned8 No - - -
1
Speed during search
for switch
Read/write Unsigned32 No 0x0005.0000
p.1132
2
Speed during search
for zero
Read/write Unsigned32 No 0x0002.0000
p.1133
04/13 CM-CAN ACU 51

 Loading...
Loading...






