5. Operation of MEC Related Controllers
279
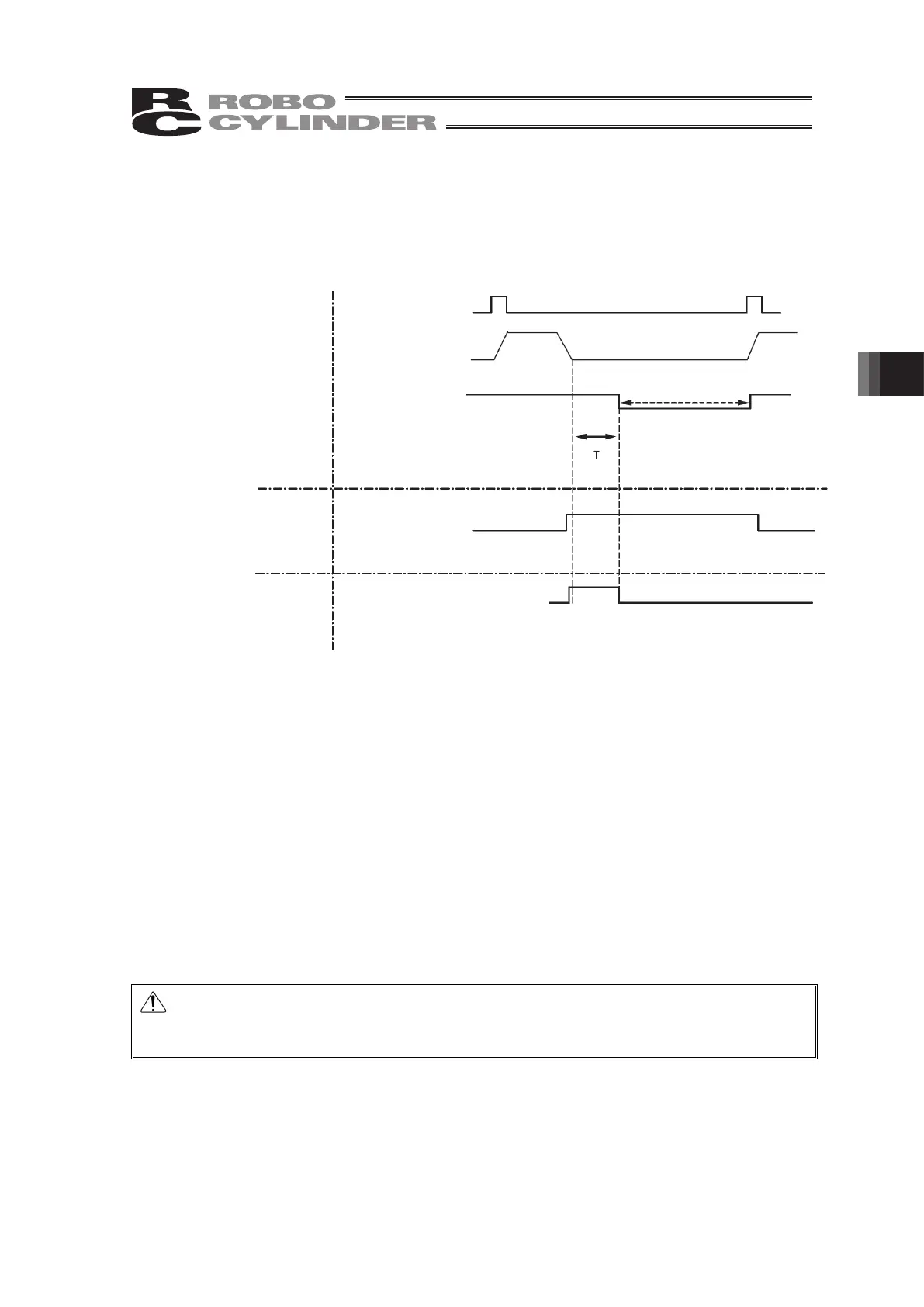
[Auto motor power (Auto servo) OFF]
The motor power (servo) will turn off automatically upon elapse of a specified period after
completion of positioning. When the next positioning command is issued, the motor power
(servo) turns on automatically and positioning is performed. Since no holding current flows
while the motor is at standstill, power consumption can be reduced.
[Statuses of position detection output signals when the push function is not used]
Even when the motor power (servo) is turned off, as long as the actuator is positioned within
the positioning band (parameter No. 1) the start point detection signal (LS0), end point
detection signal (LS1) or intermediate point detection signal (LS2) will turn ON according to
the applicable position, just like when a sensor is used. Accordingly, the position detection
signal that has turned ON will remain ON after completion of positioning unless the actuator
moves.
[Status of position complete signals when the push function is used]
In push-motion operation, the motor power (servo) does not turn off automatically while the
actuator is pushing the work part.
If the actuator has missed the work part, the motor power (servo) turns off automatically.
Once the motor power (servo) turns off, a position complete status is lost. Accordingly, the
push complete signal 0 (PE0), push complete signal 1 (PE1) and push complete signal 2
(PE2) will all turn OFF regardless of the stop position.
Caution: No holding torque is applied in the auto servo OFF mode. Since the actuator will
move in this condition if an external force is applied, pay due attention to contact
and safet
when setting an
o
eration involving auto motor power
servo
OFF.
Move signal 1 (ST0)
Move signal 2 (ST1)
Actuator movemen
Servo status
uto servo OFF mode
(A green LED blinks)
T: Time set by parameter No
Do not use
push function
Start point detection (LS0)
End point detection (LS1)
Intermediate point detection (LS2)
Use push
function
Positioning to start point complete (PE0)
Positioning to end point complete (PE1)
Positioning to intermediate point complete
(PE2)
 Loading...
Loading...