1212
11 PROCESS CONTROL INSTRUCTIONS
11.2 I/O Control Instructions
■Mode determination (1)
The following processing is performed depending on the control mode (MODE).
■Variation rate & upper/lower limiter (2)
The variation rate and upper/lower limits of the input value (E1=MV) are checked, and the data after the processing and an
alarm are output.
• Variation rate limiter processing performs the following operations, and outputs the result to the output variation rate alarm
(BB4) and the DMLA of the alarm detection (ALM).
*1 If the DMLI or ERRI of the disable alarm detection (INH) is set to 1, the output variation rate alarm (BB4) and the DMLA of the alarm
detection (ALM) are set to 0.
• Upper/lower limiter processing performs the following operations, and outputs the result to the output upper limit alarm
(BB2); output lower limit alarm (BB3); and MHA and MLA of the alarm detection (ALM).
*2 If the MHI or ERRI of the disable alarm detection (INH) is set to 1, the output upper limit alarm (BB2) and the MHA of the alarm detection
(ALM) are set to 0.
*3 If the MLI or ERRI of the disable alarm detection (INH) is set to 1, the output lower limit alarm (BB3) and the MLA of the alarm detection
(ALM) are set to 0.
■Output conversion processing (3)
The output value (BW) is calculated from the following expression.
■Loop stop processing (4)
The following processing is performed according to the SPA status of the alarm detection (ALM).
■Hold processing (5)
This processing specifies whether to hold the output value (BW) by the S.OUT2 instruction when a sensor error occurs
(detected by the S.IN instruction). The hold processing is performed when the value is determined as RUN by "Loop Stop
Determination". SM817 is used to specify whether to hold the manipulated value (MV) when a sensor error occurs.
• SM817 = OFF: Do not hold the manipulated value (MV).
• SM817 = ON: Hold the manipulated value (MV).
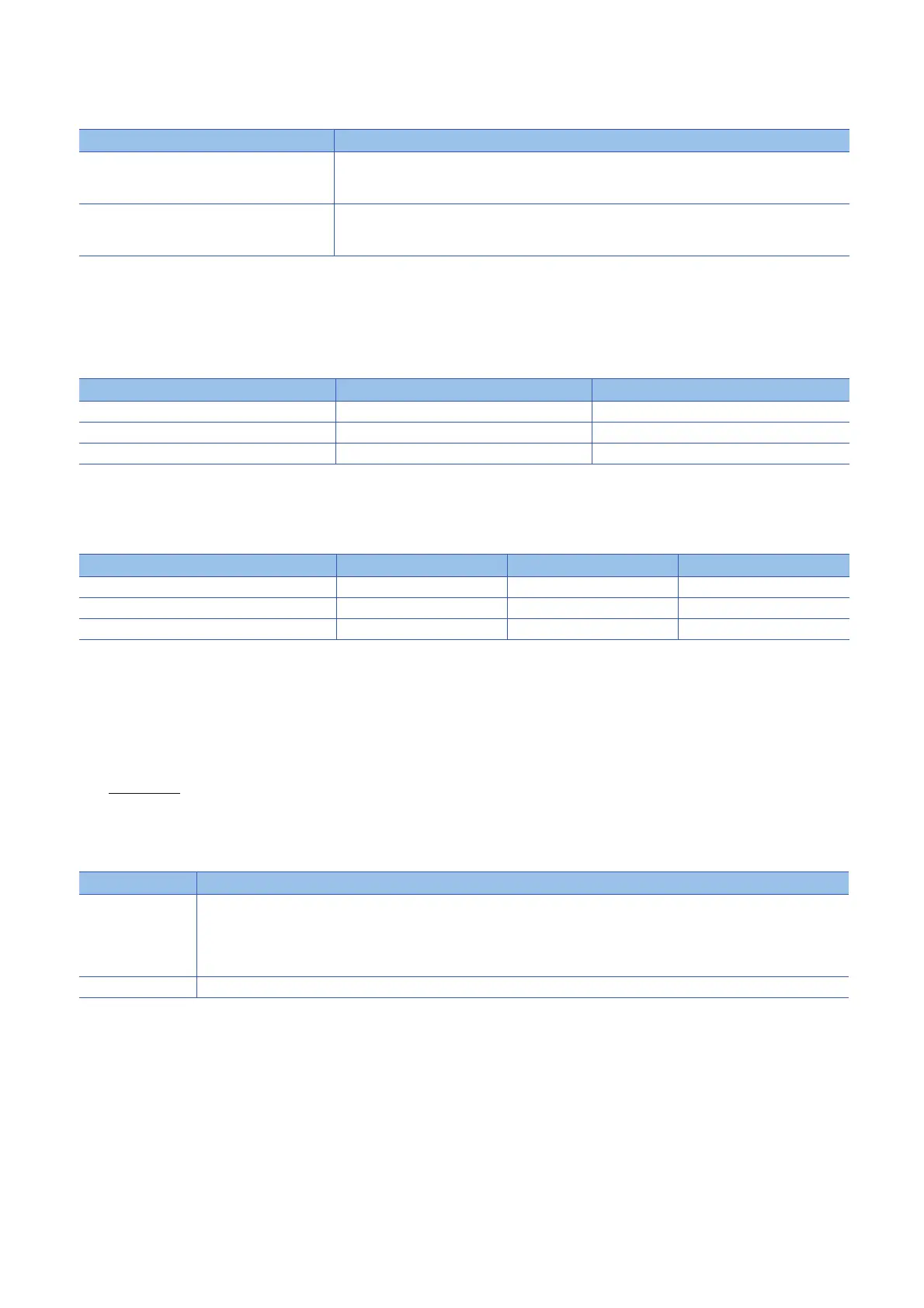
Control mode (MODE) Processing details
MAN, CMB, CMV, LCM
(alarm clear processing)
• The MHA, MLA, and DMLA of the alarm detection (ALM) are set to 0.
• The alarm bits (BB1, BB2, BB3, and BB4) are set to 0.
• "Output conversion processing (3)" is performed and the instruction ends.
AUT, CAB, CAS, CCB, CSV, LCA, LCC "Variation rate & upper/lower limiter processing (2)" is performed.
However, when ALM SEA is 1 and SM817 is on, alarm bits BB1, BB2, BB3, and BB4 are set to 0 and the
S.OUT2 instruction is terminated.
Condition BB4, DMLA Result (T1)
|E1-MV|DML 0 E1
(E1-MV) > DML 1
*1
MV + DML
(E1-MV) <- DML 1
*1
MV - DML
Condition BB3, MLA BB2, MHA MV
T1 > MH 0 1
*2
MH
T1 < ML 1
*3
0ML
ML T1 MH 0 0 T1
SPA status Processing details
1 The loop stops. When the loop stops, the following operations are performed and the S.OUT2 instruction ends.
• The last output value (BW) is held.
• The DMLA, MHA, and DLA of the alarm detection (ALM) are set to 0.
• The control mode (MODE) is set to MAN.
• The alarm bits (BB1, BB2, BB3, and BB4) are set to 0.
0 The loop runs and "mode determination (1)" is performed.

 Loading...
Loading...














