15. SERVO AMPLIFIER CONNECTION
15.6 Device Range that Can Be Set
15 - 23
SERVO AMPLIFIER CONNECTION
15
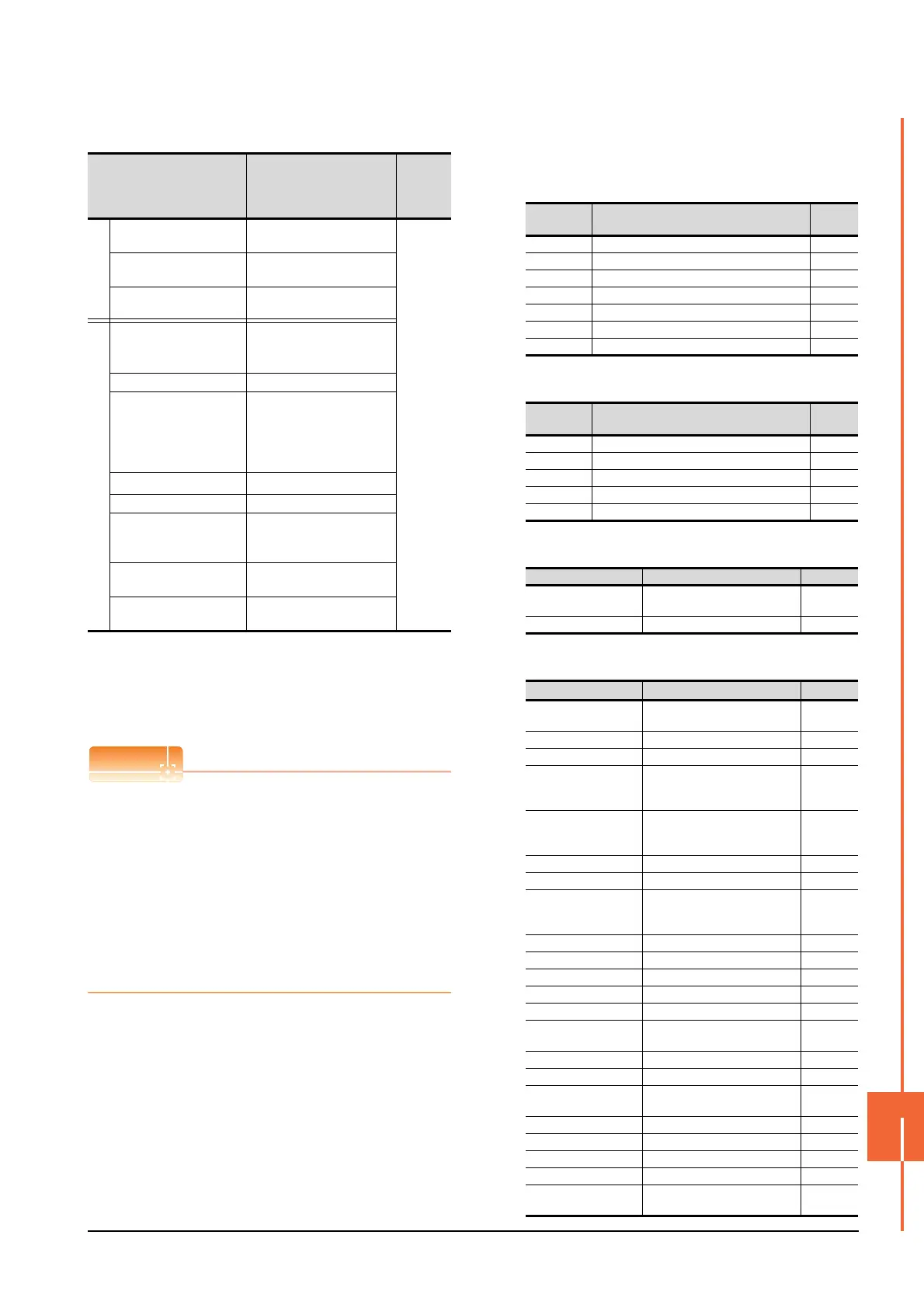
(4) MELSERVO-J2S-*A
*1 Use PRM0 to PRM84 when writing parameters to the servo
amplifier RAM.
PRM1000 to PRM1084 are used when writing parameters to
E
2
PROM of the servo amplifier.
*2 The GOT cannot read or write data from/to consecutive
devices.
*3 Only reading is possible.
Precautions for SP, OM, TMB, TMI, TMO, and TMD
devices
(1) For bit devices
Only writing is possible.
[Alternate] of a bit switch cannot be used.
Use [Set], [Reset], and [Momentary] of a bit
switch.
(2) For word devices
Only writing is possible.
Numerical input cannot be used.
When writing, use [Word Set] of a data set switch.
The following shows correspondences between virtual
devices for servo amplifier and data of the servo
amplifier used with the GOT.
(a) Servo amplifier request
(b) Operation mode selection
(c) Instruction demand (for test operation)
(d) Basic parameter/expansion parameter
Device name
*2
Setting range
Device
No.
represent
ation
Bit device
Servo amplifier request
(SP)
SP0 to SP6
Decimal
Operation mode selection
(OM)
OM0 to OM4
Instruction demand
(for test operation) (TMB)
TMB0 to TMB1
Word device
Basic parameter
/expansion parameter
(PRM)
*1
PRM0 to PRM84
PRM1000 to PRM1084
Status display (ST) ST0 to ST14
Alarm (AL)
AL0 to AL1
AL11 to AL25
AL200 to AL205
AL210 to AL215
AL230 to AL235
External input (DI)
*3
DI0
External output (DO) DO0
Input signal for test
operation
(for test operation) (TMI)
TMI0
Forced output of signal pin
(for test operation) (TMO)
TMO0
Set data
(for test operation) (TMD)
TMD0 to TMD2
Device
name
Item Symbol
SP0 Status display data clear ―
SP1 Current alarm clear ―
SP2 Alarm history clear ―
SP3 External input signal prohibited ―
SP4 External output signal prohibited ―
SP5 External input signal resumed ―
SP6 External output signal resumed ―
Device
name
Item Symbol
OM0 Normal mode (not test operation mode) ―
OM1 JOG operation ―
OM2 Positioning operation ―
OM3 Motorless operation ―
OM4 Output signal (DO) forced output ―
Device name Item Symbol
TMB0
Clears acceleration/
deceleration time constant
―
TMB1 Temporary stop command ―
Device name Item
Symbol
*1
PRM0, PRM1000
Control mode, regenerative
brake option selection
*STY
PRM1, PRM1001 Function selection 1 *OP1
PRM2, PRM1002 Auto tuning ATU
PRM3, PRM1003
Electronic gear numerator
(Command pulse multiplying
factor numerator)
CMX
PRM4, PRM1004
Electronic gear denominator
(Command pulse multiplying
factor denominator)
CDV
PRM5, PRM1005 In-position range INP
PRM6, PRM1006 Position loop gain 1 PG1
PRM7, PRM1007
Position command
acceleration/deceleration time
constant
PST
PRM8, PRM1008
Internal speed command1/limit1
SC1
PRM9, PRM1009
Internal speed command2/limit2
SC2
PRM10, PRM1010
Internal speed command3/limit3
SC3
PRM11, PRM1011 Acceleration time constant STA
PRM12, PRM1012 Deceleration time constant STB
PRM13, PRM1013
S-pattern acceleration/
deceleration time constant
STC
PRM14, PRM1014 Torque command time constant TQC
PRM15, PRM1015 Station number setting *SNO
PRM16, PRM1016
Serial communication function
selection, alarm history clear
*BPS
PRM17, PRM1017 Analog monitor output MOD
PRM18, PRM1018 Status display selection *DMD
PRM19, PRM1019 Parameter block *BLK
PRM20, PRM1020 Function selection 2 *OP2
PRM21, PRM1021
Function selection 3
(Command pulse selection)
*OP3

 Loading...
Loading...