Adapt pole posion idencaon PLI (360°)
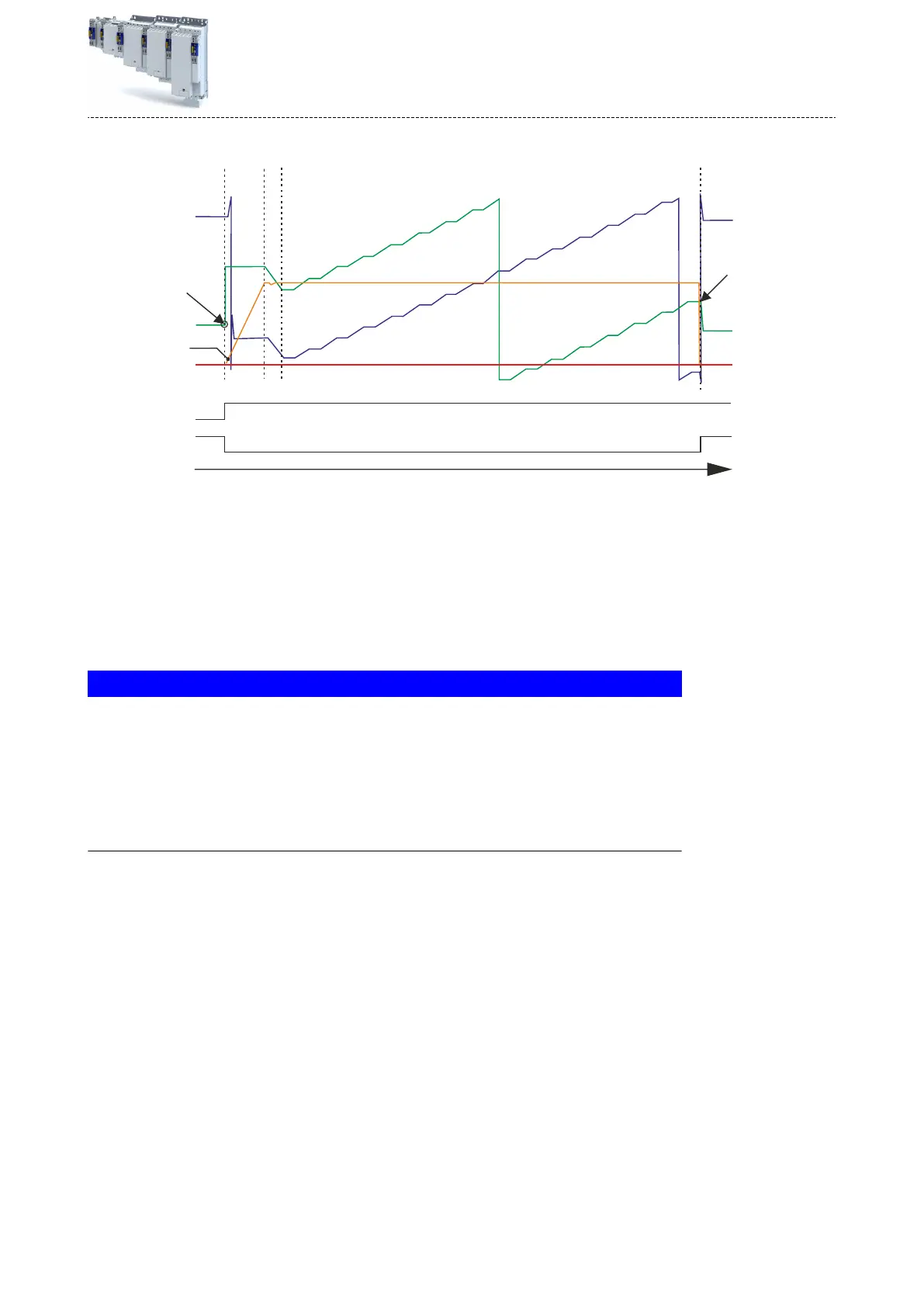
Fig. 66: Chronological sequence of the pole posion idencaon
In case of drives with a high stac fricon, mass
inera or alternang load, an opmisaon
may be necessary:
•
The amplitude of the curr
ent vector must be set so high that the motor with a high mass
inera can be accelerated.
•
The cy
clic connued rotaon of the current vector by 22.5° has to cause an equivalent
angular rotaon of the motor sha (rotor). A step funcon has to be achieved. Here,
actual posions with very low overshoots are visible.
NOTICE
Thermal overload of the motor!
The mot
or may be permanently damaged.
▶
If no temperature monitoring is available in the motor, and/or the I²xt motor monitoring
and the maximum current monitoring are not parameterised correctly, the motor can be
permanently damaged if the current amplitude is set too high!
▶
Motor overload monitoring (i²*t)
▶
Overcurrent monitoring
Overview of more objects available for
•
Idencaon
•
T
riggering
•
Diagnoscs
Tip!
An oscilloscope serves to execute the opmisaon
Conguring the feedback system
S
ynchronous motor: Pole posion idencaon (PPI)
Pole posion idencaon (PPI) 360°
229