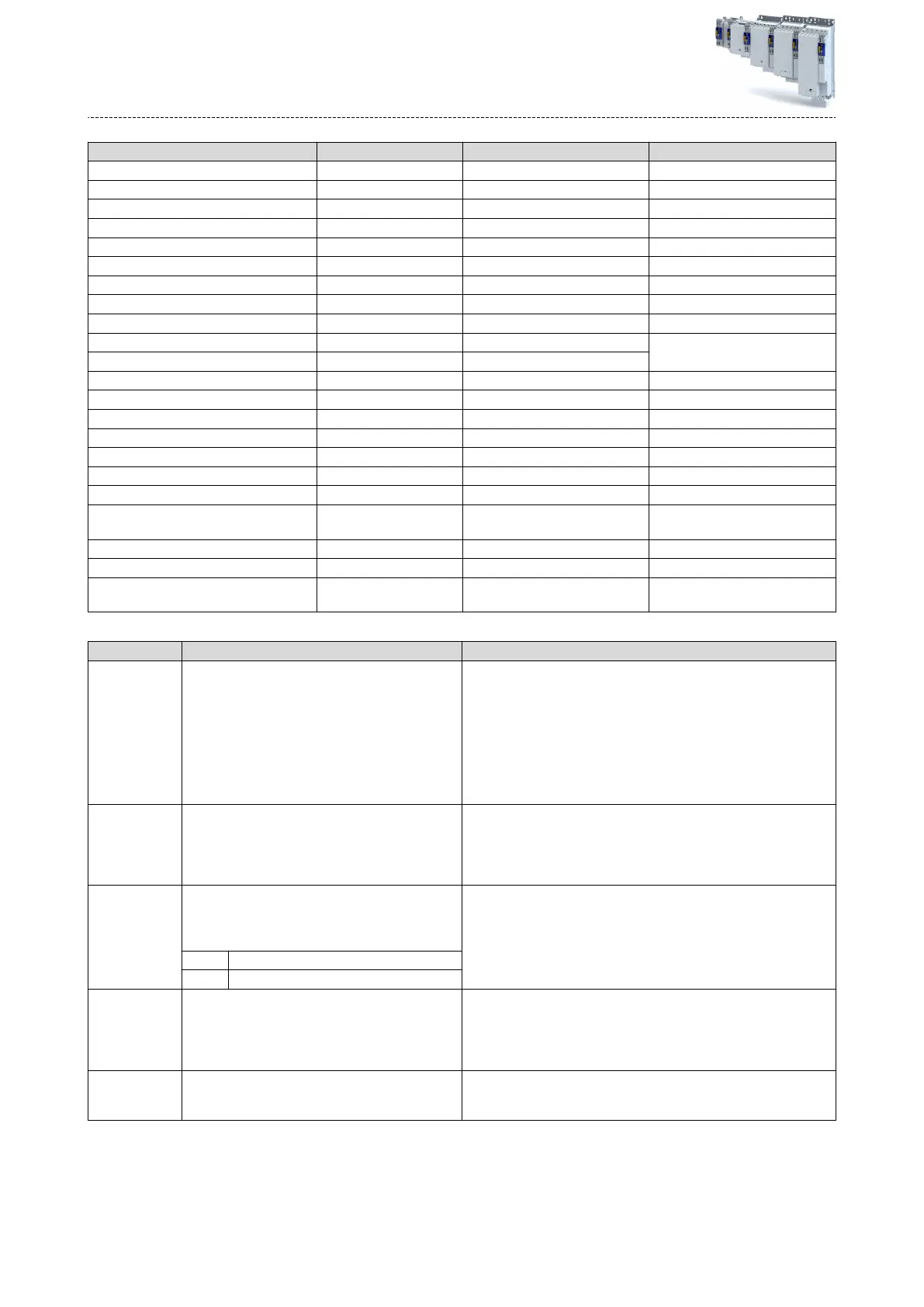
Parameter Subindex Value/unit INFO
0x2825 0 CiA402 mode
acve [0] Operang modes [5] for PLI 360°
0x2824 0 Acvate [1]
0x6040 0 0x0000 Simulaon of the CiA state machine
0x2823 0 100 Progress bar
0x2C61:001 1 100 % PLI(360°) current amplitude
0x2C61:002 2 40 s PLI(360°) ramp me
0x2C61:003 3 Field: clockwise [0] PLI(360°) direcon of rotaon
0x2C61:004 4 20° PLI(360°) fault tolerance
0x2C61:005 5 4.81 A Display
0x2C03:002 2 -90.0° Detected pole posion values
0x2C03:004 4 0.0°
0x2DDE 0 1850 current rotor angle
2 0.03 A Phase U current
3 0.04 A Phase V current
4 -0.01 A Phase W current
3 0.00 A Setpoint D current
1 0.01 A Current D current
0x6073 0 150.0 % Max current
0x6075 0 3.400 A Motor rated current, reference for
0x2C61:1
0x2D46:001 1 16.5 A Overcurrent monitoring: threshold
1 5.00 A User info regarding rated current
2 10.00 A User info regarding maximum cur-
rent
Parameter
Address Name / seng range / [default seng] Info
0x2C61:001 Pole posion
idencaon (360°) sengs: Current
amplitude
1 ... [100] ... 1000 %
•
Seng can only be changed if the inverter is inhibi-
ted.
Percentage adaptaon of the current amplitude.
•
For large machines and high mass inera values or for linear direct
drives, the current amplitude usually must be increased.
•
Default seng 100 % ≡ 141 % of Motor rated current (0x6075)
Note!
If the current amplitude is set to > 100 %, the device ulisaon (Ixt)
monitoring and/or one of the motor monitoring funcons may respond
and cause the abort of the pole posion idencaon.
0x2C61:002 Pole posion
idencaon (360°) sengs: Ramp me
1 ... [40] ... 600 s
•
Seng can only be changed if the inverter is inhibi-
ted.
Percentage adaptaon of the ramp me.
•
F
or large machines and high mass inera values, the ramp me must
be incr
eased.
•
For small machines, however, the pole posion idencaon can be
accelerated by reducing the ramp me.
0x2C61:003 Pole posion idencaon (360°) sengs: Direcon
of rotaon
•
Seng can only be changed if the inverter is inhibi-
ted.
Selecon of travel direcon.
In some situaons, it may be helpful to reverse the travel direcon for
the pole posion idencaon (e. g. for linear motor at the end stop).
0 CW
1 Drehfeldrichtung
0x2C61:004 Pole posion idencaon (360°) sengs: Error toler-
ance
15 ... [20] ... 50 °
Seng of the fault tolerance for the plausibility check.
•
If the rotor posion detected via the encoder system is not within the
tolerance zone around the posion that is output in a controlled man-
ner, the pole posion idencaon is aborted and the parameterised
error response is tripped.
0x2C61:005 Pole posion idencaon (360°) sengs: Absolute
current amplitude
•
Read only: x.xx A
Display of the absolute current amplitude.
Conguring the feedback system
S
ynchronous motor: Pole posion idencaon (PPI)
Pole posion idencaon (PPI) 360°
230