PID Loop Operation
Maintenance
8–35
PID Loop Operation
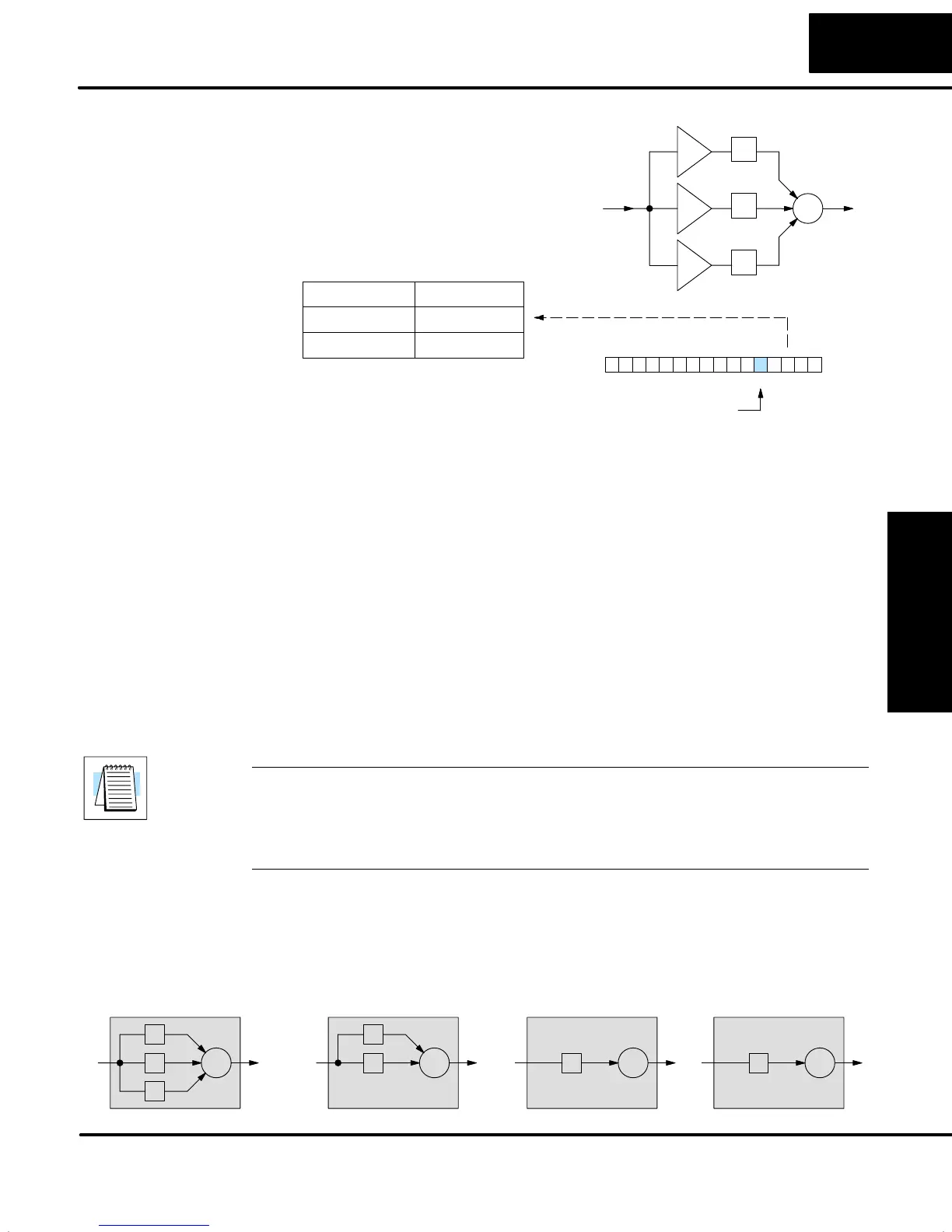
The P, I and D gains are 4-digit BCD
numbers with values from 0000 to 9999.
They contain an implied decimal point in
the middle, so the values are actually
00.00 to 99.99. Some gain values have
units – Integral gain may be in units of
seconds or minutes, by programming the
bit shown. Derivative gain is in seconds.
S
+
P
I
D
+
+
kp
ki
kd
V+10 P gainXX.XX
V+11 I gainXX.XX
V+12 D gainXX.XX
–
0=sec, 1=min.
sec.
PID Mode 2 Setting V+01
013456789101112131415 2Bit
Units select
In DirectSOFT32’s trend view, you can program the gain values and units in realtime
while the loop is running. This is typically done only during the loop tuning process.
Proportional Gain – This is the most basic gain of the three. Values range from
0000 to 9999, but they are used internally as xx.xx. An entry of “0000” effectively
removes the proportional term from the PID equation. This accommodates
applications which need integral-only loops.
Integral Gain – Values range from 0001 to 9998, but they are used internally as
xx.xx. An entry of “0000” or “9999”causes the integral gain to be “R”, effectively
removing the integrator term from the PID equation. This accommodates
applications which need proportional-only loops. The units of integral gain may be
either seconds or minutes, as shown above.
Derivative Gain – Values range from 0001 to 9999, but they are used internally as
xx.xx. An entry of “0000” allows removal of the derivative term from the PID equation
(a common practice). This accommodates applications which need proportional
and/or integral-only loops. The derivative term has an optional gain limiting feature,
discussed in the next section.
NOTE: It is very important to know how to increase and decrease the gains. The
proportional and derivative gains are as one might expect... smaller numbers
produce less gains and larger numbers produce more gain. However, the integral
term has a reciprocal gain(1/Ts), so smaller numbers produce more gain and larger
numbers produce less gain. This is very important to know during loop tuning.
Each of the P, I, and D gains allows a setting to eliminate that term from the PID
equation. Many applications actually work best by using a subset of PID control. The
figure below shows the various combinations of PID control offered on the DL05. We
do not recommend using any other combination of control, because most of them
are inherently unstable.
S
+
P
I
D
+
+
S
+
P
I
+
S
P
+
S
I
+
Using a Subset of
PID Control