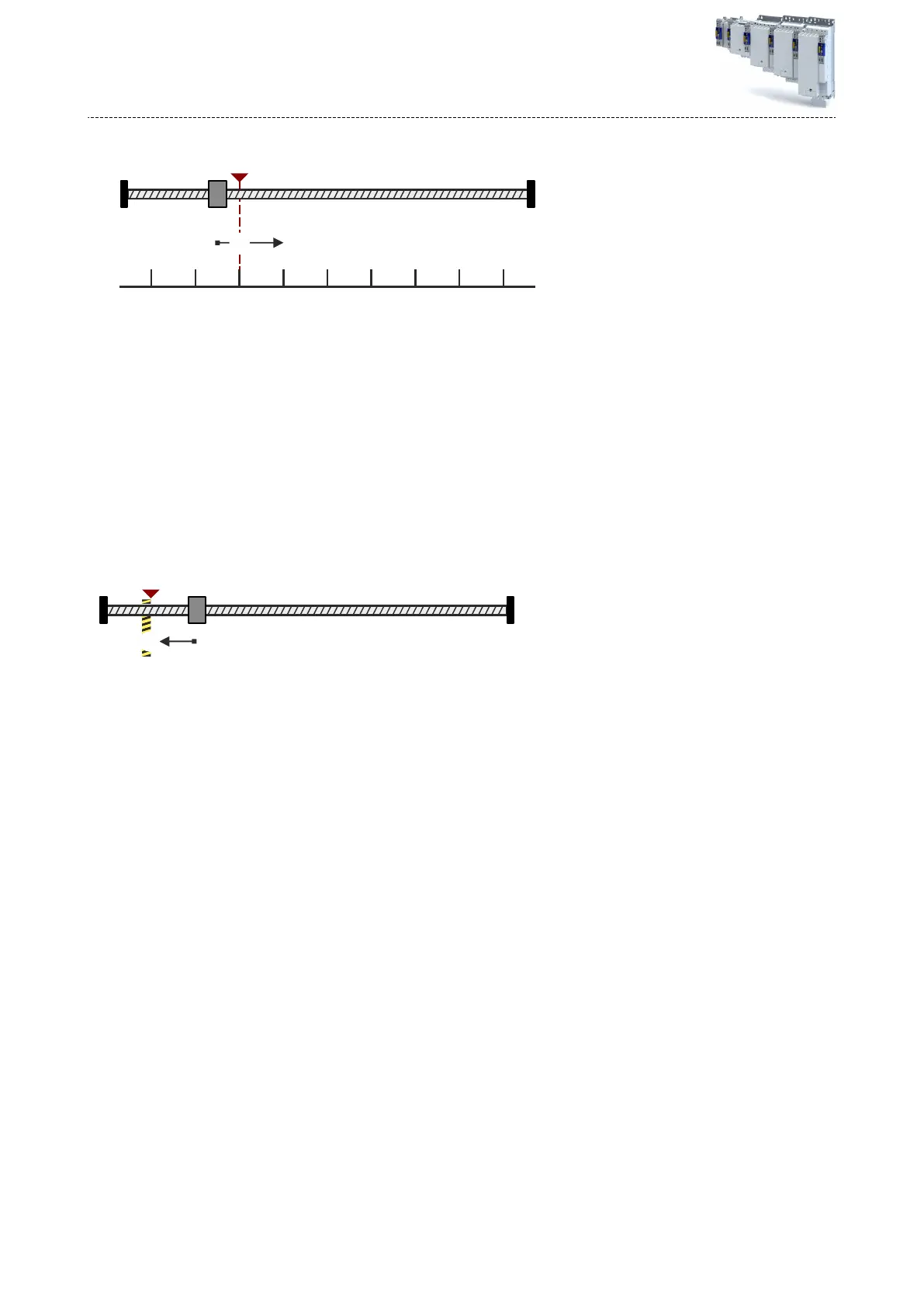
Homing mode 34: CwTP
Fig. 16: Posive
direcon to touch probe
A Touch probe/zero pulse
Sequence of case ①:
1.
The machine part mo
ves to posive
direcon with prole data set 1 and acvates the
touch probe detecon.
2.
The f
ollowing set edge of the encoder zero pulse/touch probe sensor (A) sets the refer-
ence.
3.
Further acons can be selected:
•
Driv
e stops (default seng).
•
Relave posioning by a set target posion.
•
Ab
solute posioning to a set target posion.
Homing mode -1: CcwTorqueLimit
Fig. 17: Negave
direcon to torque limit
Sequence of case ①:
1.
The machine part mo
ves in negave
direcon with reduced torque and prole data set 1.
2.
The reference is set if the following two condions for the set blocking me are fullled at
the same
me:
•
The curr
ent speed is lower than the threshold set for standsll detecon.
•
The current torque is higher than the set torque limit (homing to end stop).
3.
Further acons can be selected:
•
Driv
e stops (default seng).
•
Relave posioning by a set target posion.
•
Ab
solute posioning to a set target posion.
Technology applicaon (TA) basic sengs
Moon
sengs
Homing
68