112 • Subject area _PMOD – Open-loop position control (option) Parameter Description MC6000/7000
_ENCD
_VAL
Index
_VFCON
_PMOD
_KPAD
Contents
Introduction
_SIO
_SCTY
_REF
_SYS
_IO1
_IO2
_CAN
_OPT1
_MOT
_CONF
_TCON
_SCON
_PCON
_PMOD – Open-loop position control (option)
Calculation aids
Example for determining the scaling factors for travel, velocity and accelera-
tion
In order to make the position entries in a unit of length in a linear application, for example, the position
controller must be informed of the context. This is done on the Units tab.
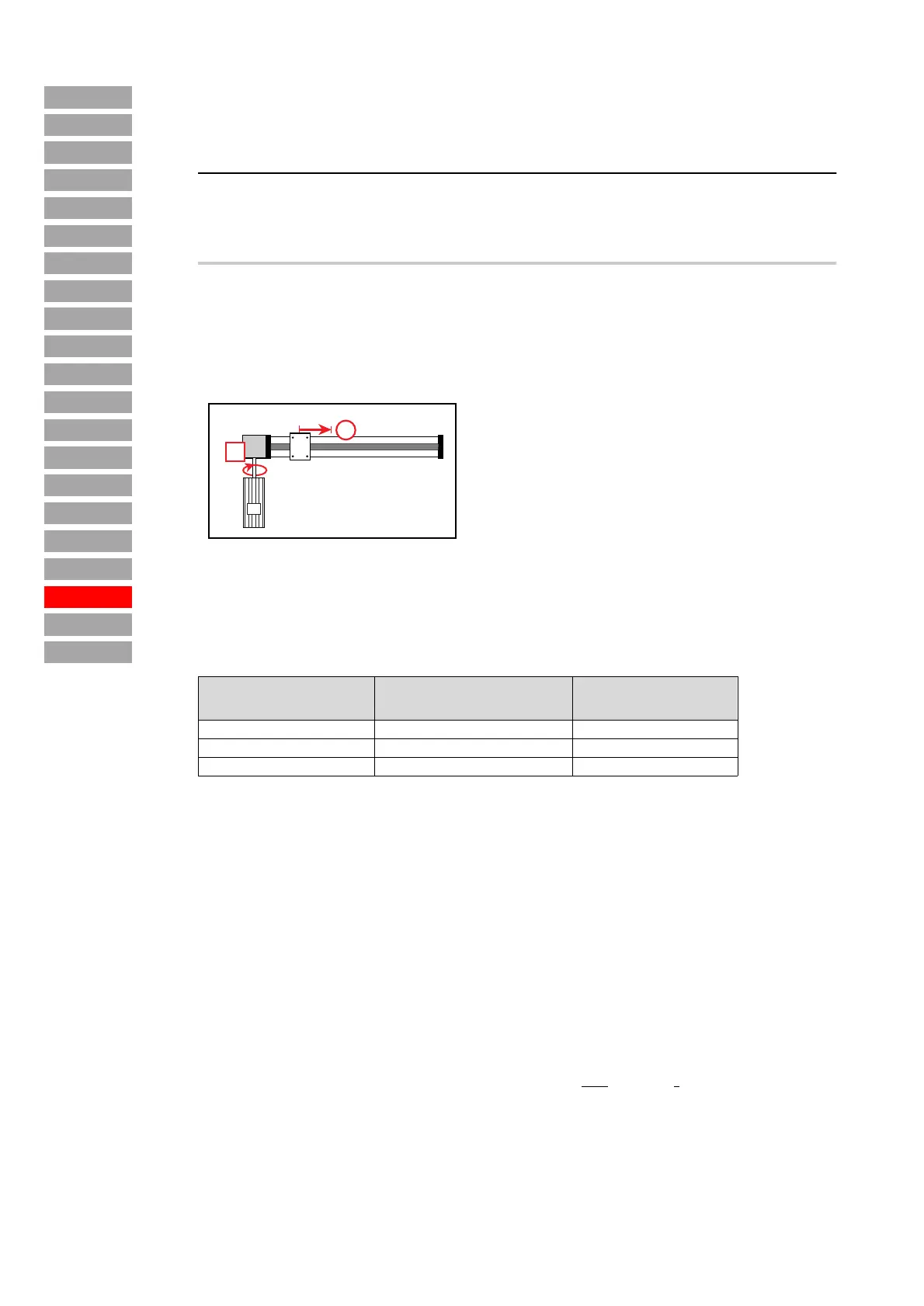
Example: Linear axle with toothed belt drive
In one revolution of the carriage covers .
The following translations are required:
Travel resolution
That is to say: The positions can now be specified in mm.
Motor:
1 motor rev ⇔
65536 increments
(regardless of motor and encoder type)
Gearing: i = 4
Linear trans-
mission:
1 axle rev
⇔ 192 mm
Desired
programming unit
Internal unit
Travel: mm Incr.
Velocity: m/min Incr./ 5 ms
Acceleration: m/s Incr./ (5 ms)
General rule:
Here:
Example - requirement is default in programming
unit mm:
The internal unit is isolated, the factor represents
the scaling factor K10/K11.
The ratio K10/K11 should be chosen as small as
possible. Reduction produces the following:
Result:
,
s
i
s
Pinion circumfence
Transmission ratio
----------------------------------------------
192mm
i 4=()
------------------48mm===
1U 48mm 65536Incr.==
Programming unit =
K10
K11
----------
Incr.⋅
1mm
65536
48
---------------
Incr. =
K10
K11
----------
K10
K11
----------
65536 16⁄
48 16⁄
-------------------------
4096
3
------------==
K10 4096= K11 3=