42 • _ENCD – Encoder Subject area Parameter Description MC6000/7000
_ENCD
_VAL
Index
_VFCON
_PMOD
_KPAD
Contents
Introduction
_SIO
_SCTY
_REF
_SYS
_IO1
_IO2
_CAN
_OPT1
_MOT
_CONF
_TCON
_SCON
_PCON
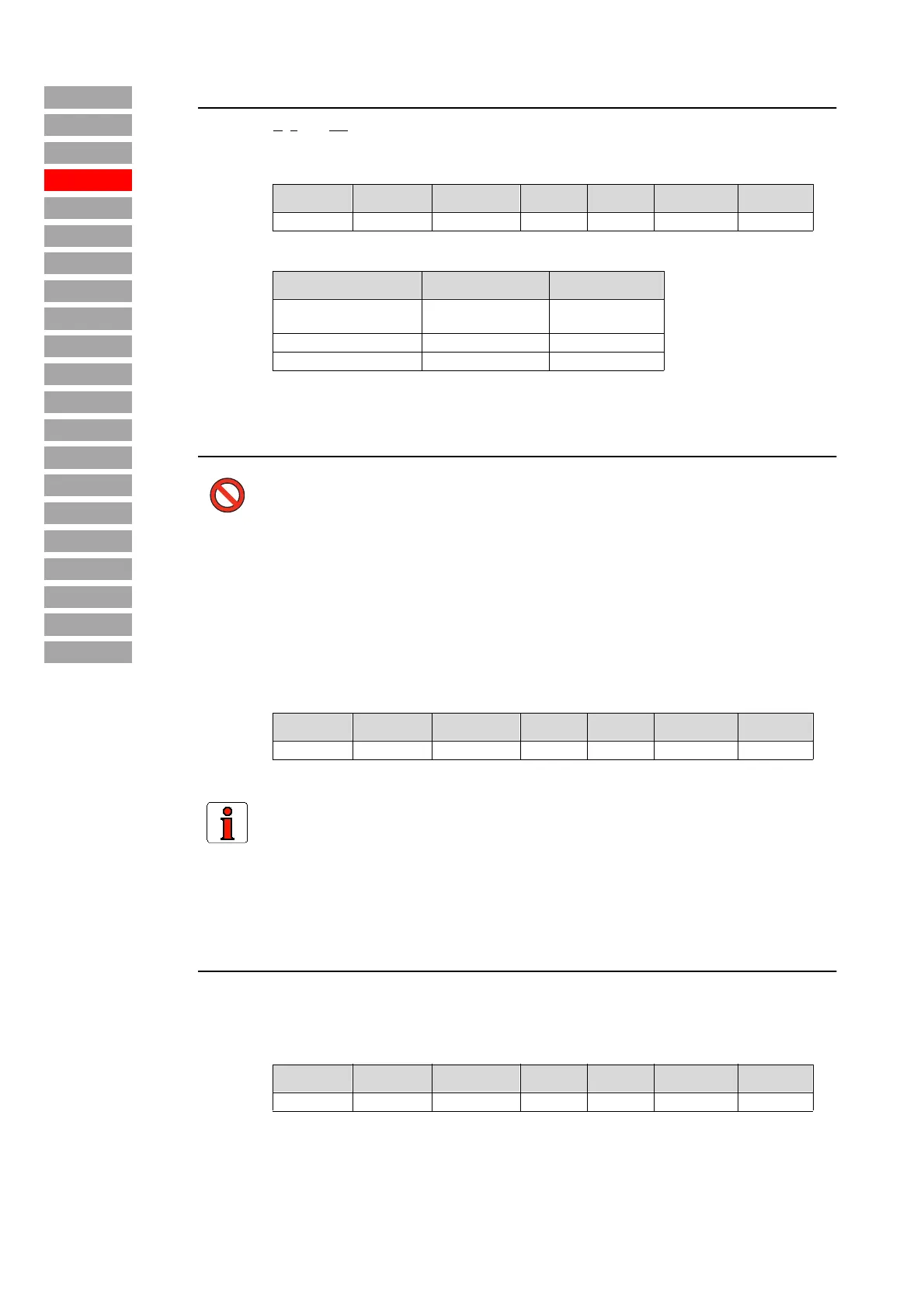
333-ECOFF - Encoder offset
Source: Encoder Offset
Function: Offset of the encoder (correction value for the mechanical mounting orientation)
17-ECSG - Controller gain for encoder simulation
Source:
Function: Parameter only for MC7000 with setting ECSIM = 1-X.
The positional accuracy of the encoder simulation is safeguarded by way of a control loop.
This is a P-controller. The input of the controller comprises the difference between the
actual position of the rotor and the position simulated to the outside world (by way of the
encoder simulation). From this control deviation the manipulated variable is formed.
29-ECSIM - Mode of encoder simulation
Source: Encoder Simulation
Function: Parameter only for MC7000.
Mode of encoder simulation
Values:
Minimum Maximum Factory set. Unit MODE SMARTCARD Type
0000H FFFFH 0000H – R4W5 DRIVE USIGN16
Encoder type Value range Corresponding to
R1 (single pole pair), all
optical encoders Gx
0000 H ... FFFF H 360°
R2 (two pole pair) 0000 H ... FFFF H 180°
R8 (three pole pair) 0000 H ... FFFF H 120°
CAUTION - Do not change parameter!
Parameter only for development and service purposes
Values:
Minimum Maximum Factory set. Unit MODE SMARTCARD Type
0.0128 16 1 – R5W6 OPTN2 FLOAT32
Note:
If more dynamism of the encoder simulation output is desired, increase ECSG. This
does, however, mean more noise on the encoder simulation frequency.
Values:
Minimum Maximum Factory set. Unit MODE SMARTCARD Type
1-1 1-X – R4W4 OPTN2 USIGN8