68 • _PCON – Position control Subject area Parameter Description MC6000/7000
_ENCD
_VAL
Index
_VFCON
_PMOD
_KPAD
Contents
Introduction
_SIO
_SCTY
_REF
_SYS
_IO1
_IO2
_CAN
_OPT1
_MOT
_CONF
_TCON
_SCON
_PCON
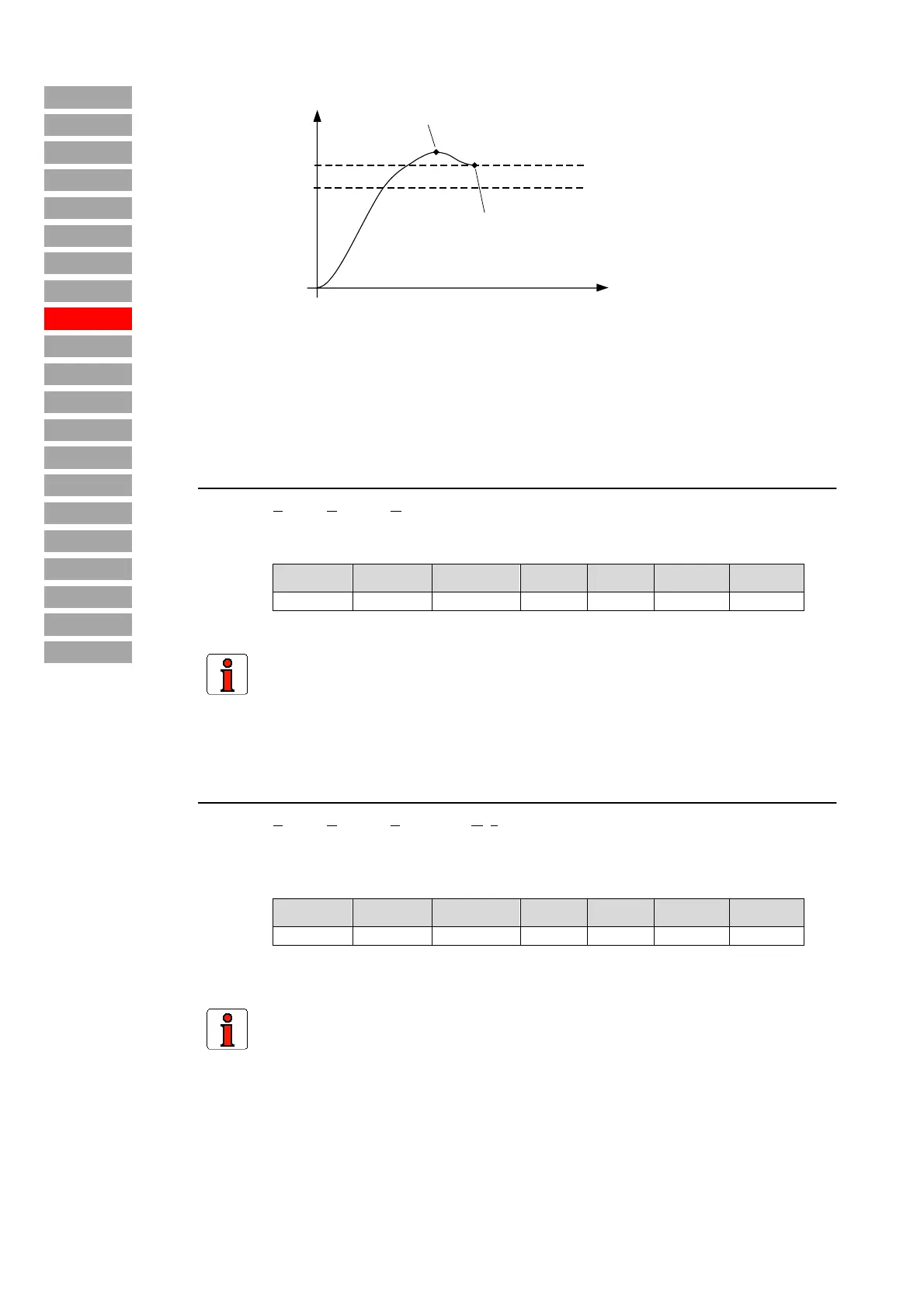
The servocontroller searches for the next zero after the reference cam (Rnok). When the reference cam
is reached the speed is braked with the braking ramp (1).
In the setting PCAZ = OFF the drive stops on completion of the braking ramp in position (2), regardless
of the zero point of the encoder (NP).
With PCAZ = ON the drive runs back to the encoder zero (3).
381-PCG - Position controller gain
Source: Position Controller Gain
Function: Gain of the position controller (P-component)
382-PCAMX - Acceleration limit value of position controller (only MC6000)
Source: Position Controller Acceleration Maximum
Function: Acceleration limit value of the position controller (ramp)
Parameter only on MC6000.
Values:
Minimum Maximum Factory set. Unit MODE SMARTCARD Type
1 16387 4000 – R1W3 DRIVE FLOAT32
Note:
On the MC6000 parameter PCGFA can be used to precision-set a percentage gain
online.
Values:
Minimum Maximum Factory set. Unit MODE SMARTCARD Type
0.1 1e+06 1800 – R2W3 APPLI FLOAT32
Note:
Overshoot occurs if PCAMX is selected too high. When using PosMod1, use the
appropriate machine parameters K17 to K24.
p (t)
t
PCAZ = ON
PCAZ = OFF
RNok
NP
(1)
(2)
(3)