_CONF – Device configuration and I/O Subject area • 17Parameter Description MC6000/7000
_ENCD
_VAL
Index
_VFCON
_PMOD
_KPAD
Contents
Introduction
_SIO
_SCTY
_REF
_SYS
_IO1
_IO2
_CAN
_OPT1
_MOT
_CONF
_TCON
_SCON
_PCON
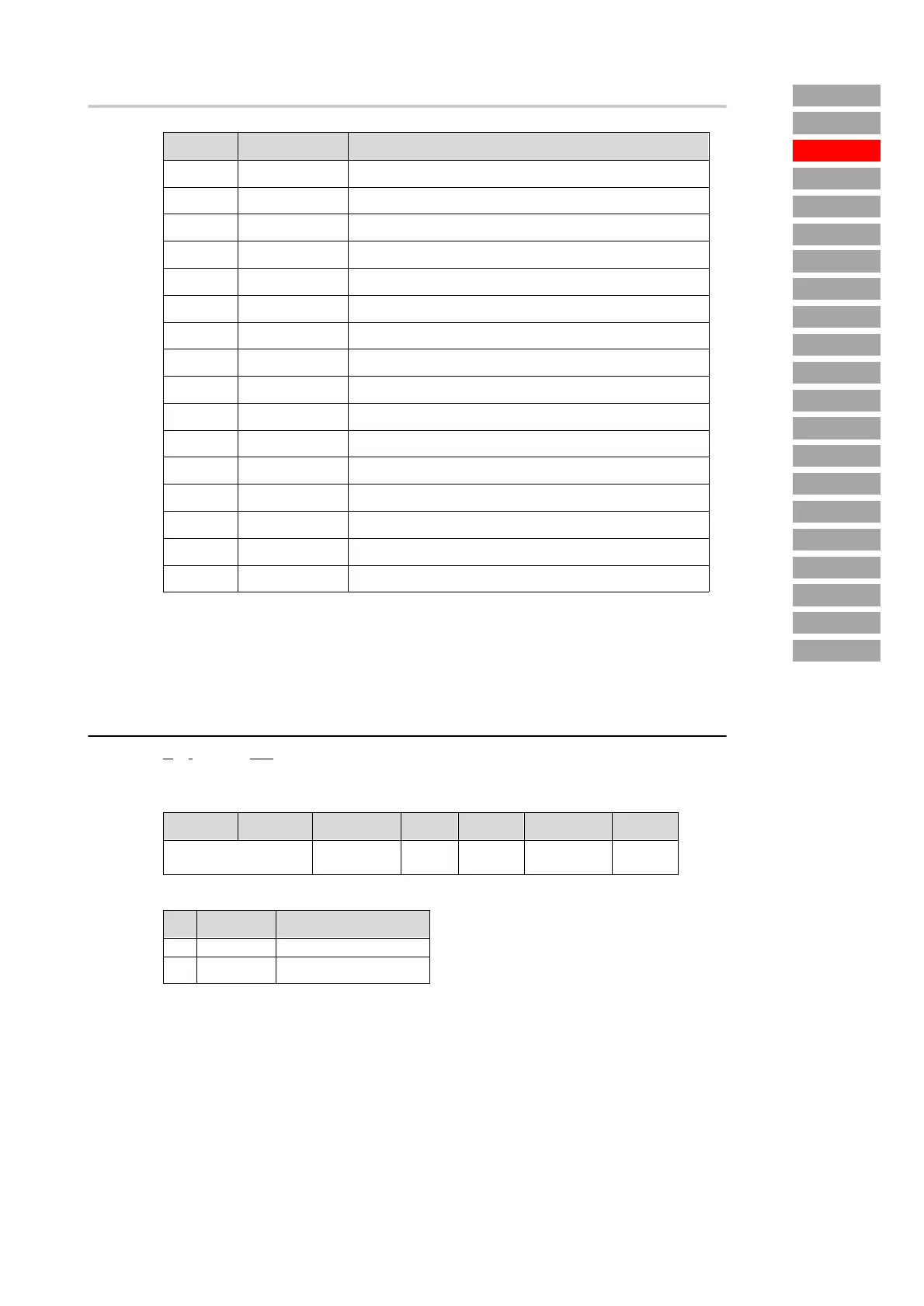
CFHSW on MC7000
Example: 2C81 H = asynchronous machine with resolver connected, I/O expansion AH6, memory
upgrade for software version 3.0 and higher
301-CFMOT - Motor type
Source: Configuration Motor
Function: The parameter defines the motor type (synchronous/asynchronous).
Bit position Value of position Meaning of bit
0 0001 H Resolver parameterized (R1, R2, R8)
1 0002 H Encoder with sinusoidal output parameterized (G1)
2 0004 H Encoder with square output parameterized
3 0008 H Single-turn absolute value generator with SSI interface (G2, G5)
4 0010 H Multi-turn absolute value generator with SSI interface (G3)
5 0020 H Option slot 1 occupied (e.g. AH7)
6 0040 H Position communication slot occupied (e.g. Motion)
7 0080 H Asynchronous motor parameterized
8 0100 H Synchronous motor parameterized
9 0200 H Special motor parameterized
10 0400 H Module slot 1 occupied with 8 inputs (AH6)
11 0800 H Module slot 2 occupied with 4 outputs (AH6)
12 1000 H CAN bus interface (C11) occupied
13 2000 H Memory upgrade occupied (suitable for SW 3.0 and higher)
14 4000 H Motor PTC evaluation occupied
15 8000 H Driver for holding brake occupied (HB1)
Values:
Minimum Maximum Factory set. Unit MODE SMARTCARD Type
See table
MC6000: AS
MC7000 PS
– R4W5 DRIVE USIGN8
Settings
No. Setting Motor type
0 AS Asynchronous servomotor
1 PS Synchronous servomotor