_PCON – Position control Subject area • 71Parameter Description MC6000/7000
_ENCD
_VAL
Index
_VFCON
_PMOD
_KPAD
Contents
Introduction
_SIO
_SCTY
_REF
_SYS
_IO1
_IO2
_CAN
_OPT1
_MOT
_CONF
_TCON
_SCON
_PCON
308-PDMX - Max. position deviation (limit for tracking error)
Source: Position Difference Maximum
Function: Input of the (absolute) maximum deviation between actual and reference position. If the
deviation is greater than the specified value, the error E-FLW is delivered and the output
with the function /EFLW is set.
For stepper motor interface, electronic gearing and P
OSMOD modes.
121-RCDE - Increment size of register control
Source: Register Control Delta Epsilon
Function: Distance in revolutions by which the synchronous position of the axle is shifted online
(maximum: RCEM\
).
For stepper motor interface and electronic gearing modes.
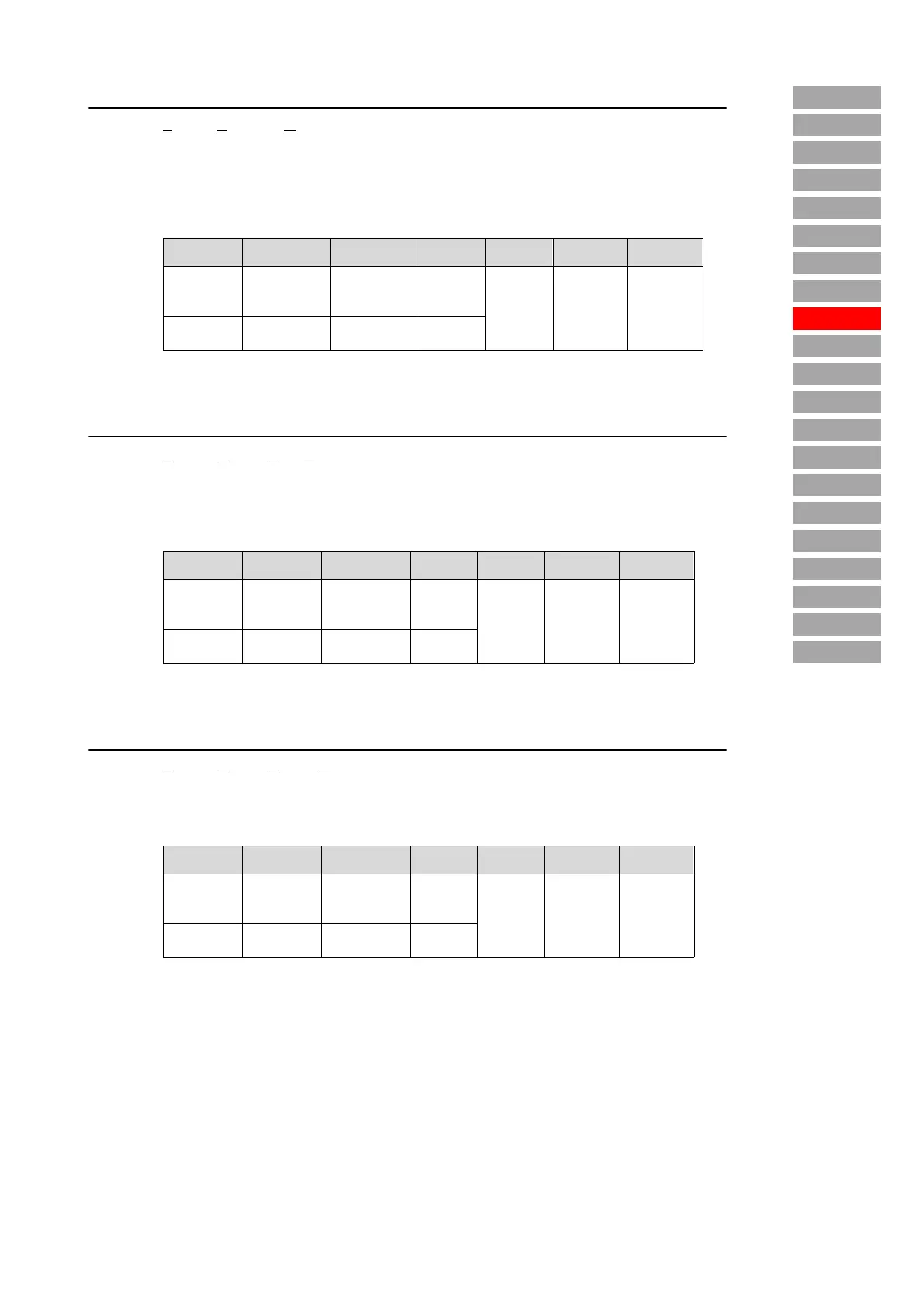
122-RCEM - Max. adjustment distance for register control
Source: Register Control Epsilon Maximum
Function: Max. amount of adjustment distance by which the synchronous position can be shifted.
For stepper motor interface and electronic gearing modes.
Values:
Minimum Maximum Factory set. Unit MODE SMARTCARD Type
In the
Parameter
Editor:
0 32764 5
Revolu-
tions
R3W3 APPLI INT32Q16
In the Mode
window:
0
2.147.483.647
(31 bits)
327.680
Incre-
ments
Values:
Minimum Maximum Factory set. Unit MODE SMARTCARD Type
In the
Parameter
Editor:
010
Revolu-
tions
R2W2 APPLI INT32Q16
In the Mode
window:
0 65535 0
Incre-
ments
Values:
Minimum Maximum Factory set. Unit MODE SMARTCARD Type
In the
Parameter
Editor:
011
Revolu-
tions
R2W2 APPLI INT32Q16
In the Mode
window:
0 65535 65535
Incre-
ments