114 • Subject area _PMOD – Open-loop position control (option) Parameter Description MC6000/7000
_ENCD
_VAL
Index
_VFCON
_PMOD
_KPAD
Contents
Introduction
_SIO
_SCTY
_REF
_SYS
_IO1
_IO2
_CAN
_OPT1
_MOT
_CONF
_TCON
_SCON
_PCON
Distance unit
On the Units tab you define the unit with which destination positions and positioning travels are entered
in the sequence program or in manual mode.
l In the setting "Calculation from resolutions", the "travel resolution" corresponds to the distance unit.
l In the "Direct input" setting the distance unit can be freely defined by a fraction (Í parameter
POWGZ / POWGN). As a result of the representation in the form of a fraction the travel resolution
can be entered absolutely precisely (with no rounding error).
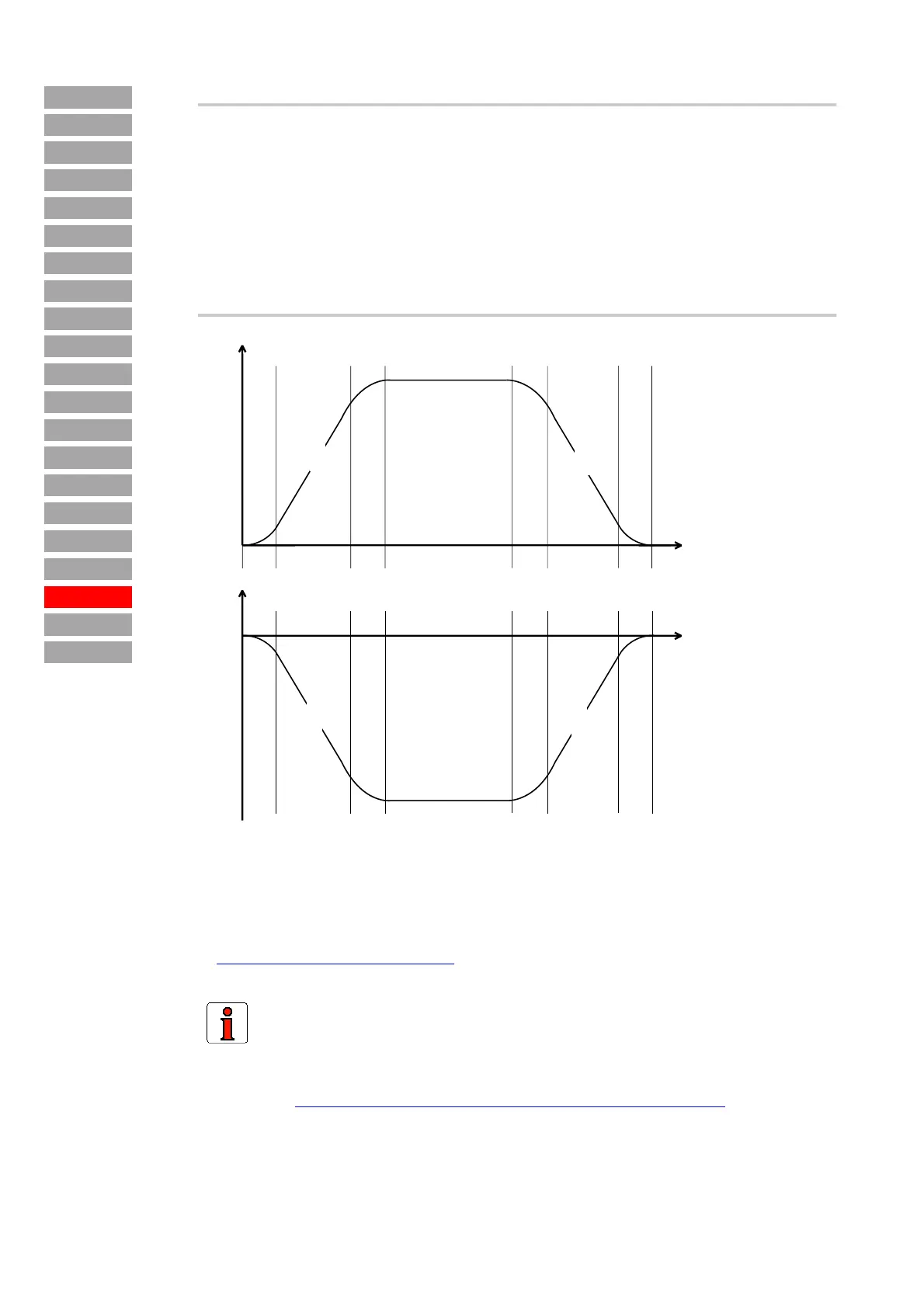
Acceleration ramps
The graphic at the top shows the parameters for accelerations in positive direction of rotation; the bot-
tom graphic shows the parameters for accelerations in negative direction.
For example, the parameter POLAP (K17) determines the max. permissible startup acceleration rate in
positive direction of rotation.
Í Positive direction of rotation, page 115
Note:
With the aid of the K-factors the ramps can be adjusted in percent in the sequence
program. Example: SET K17 = 50 causes the position controller to work with 50 %
of the ramp set in parameter POLAP.
Í 505-POBEP - Acceleration mode in positive direction (K15), page 117
v
K17
K19
K21
K21
K23
K23
K15=1
v
K18
K20
K22
K22
K24
K24
K16=1
t
t
505-POBEP
506-POBEN
507-POLAP
511-POPAP
511-POPAP
509-POBLP
513-POBPP
513-POBPP
508POLAN
512-POPAN
512-POPAN
510-POBLN
514-POBPN
514-POBPN