TM Palletizing Operator User’s Manual Product Version: 1.0 / Document Version: 1.0 157
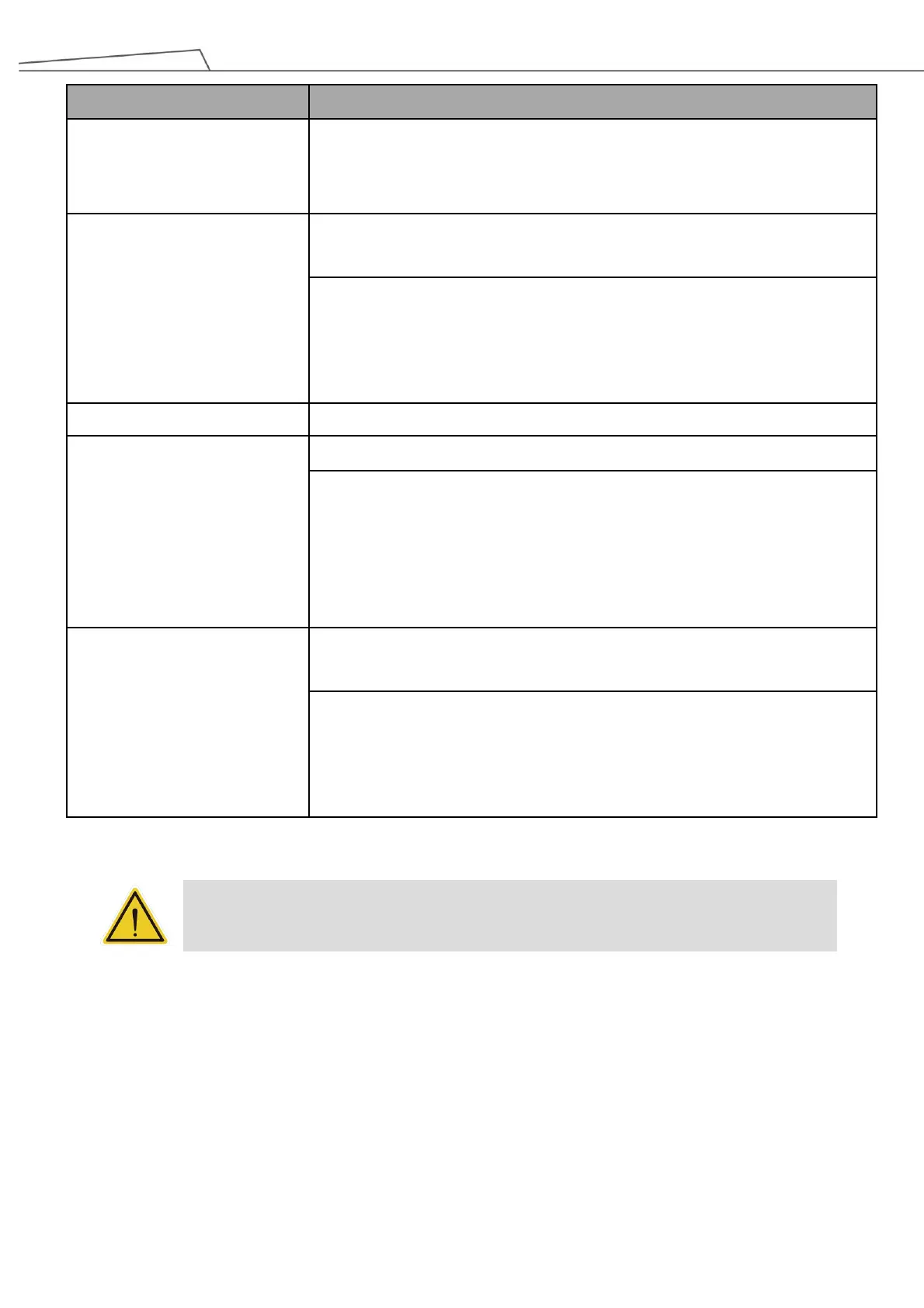
Default setting: triggered by DI14
Note: if users wish to change this setting, they have to implement a new subflow
to replace this subflow.
Advanced5_Interval_Between
_Layers
This subflow allows users to add interval between layers of boxes, such as
insertion of slip sheet.
Users may refer to
TMOperator_TMROBOT_TMPLTZOP_V001_Main1_pillar_robot_base for
XYZ coordinates, which will record the relative direction between the point
position and the pillar height.
This subflow allows users to replace “Via Point” nodes.
This subflow allows users to replace “Approach Vector” nodes.
Users may refer to
vision_TMOperator_TMROBOT_TMPLTZOP_V001_Main1_Step3_Mark_Rec
ognition
for XYZ coordinates, which will record the relative direction between the current
box and placement location when the palletizing is stopped.
This subflow allows users to add extra vision-related applications, such
as barcode scanning.
Users may refer to
TMOperator_TMROBOT_TMPLTZOP_V001_Main_Vision_Mark_Recognition
for XYZ coordinates, which will record the relative direction with vision related
coordinates.
Table 31: Definitions of Advanced2-8
WARNING:
Make sure Approaching Vector Z is higher box.