TM Palletizing Operator User’s Manual Product Version: 1.0 / Document Version: 1.0 27
1.4.3 Vertical Lifting Force per Suction cup
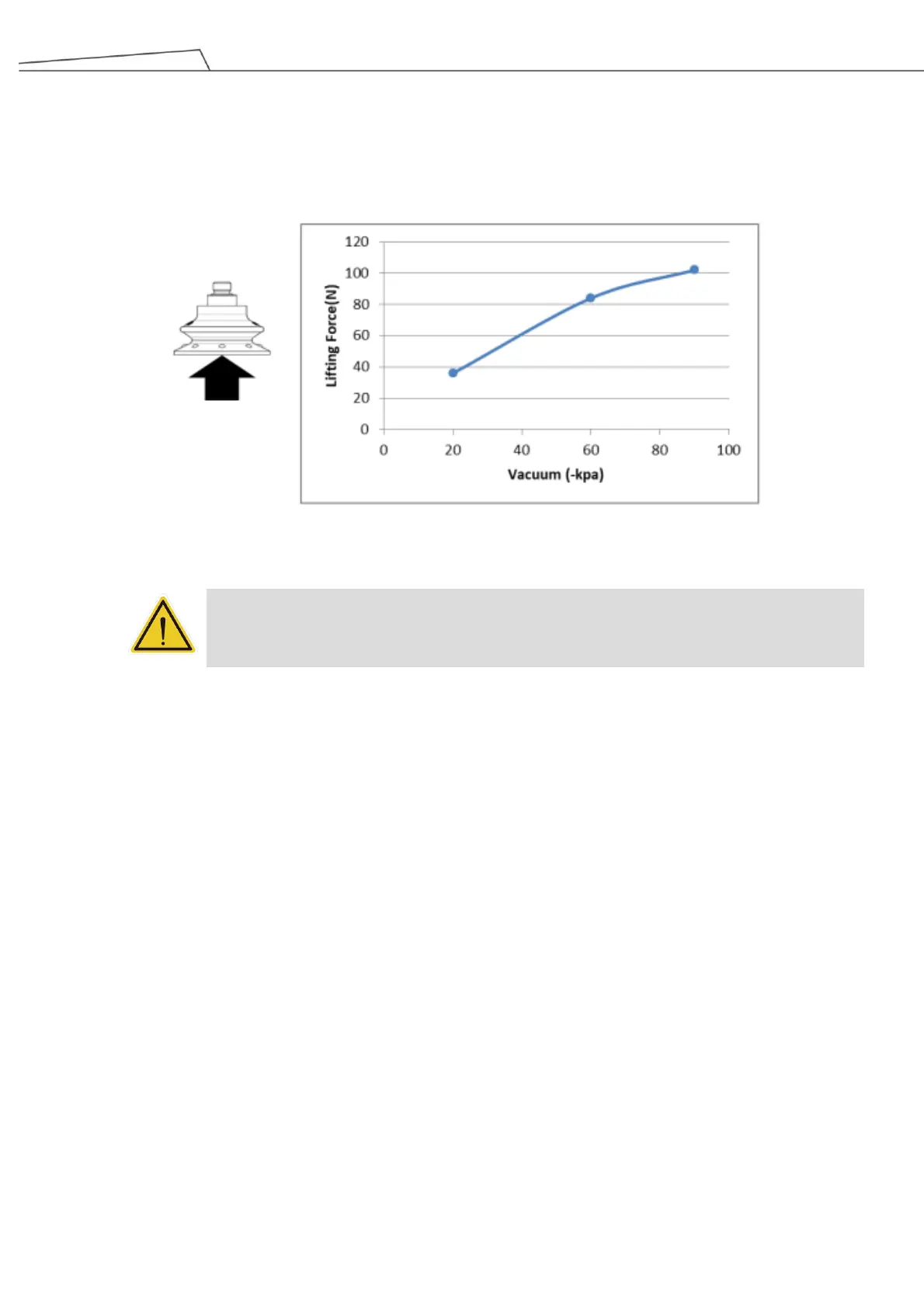
The following diagram illustrates the relation between vertical lifting force and vacuum per suction cup. The
vacuum pressure is related to the input compressed air pressure channeled to vacuum generator.
Figure 8: Vertical Lifting Force per Suction Cup
1.4.4 Vacuum pressure sensor
The default value of vacuum pressure set by the sensor is -40kPa. If the detected vacuum pressure is lower
than -40kPa, the sensor will determine that the object has been gripped. Users may adjust the sensor’s
default value of vacuum pressure based on the objects to be gripped. For details about pressure sensor
setting, refer to Appendix – B: Vacuum Pressure Sensor Setting
It is recommended that the default sensor value of vacuum pressure is no lower than -60kPa. If the degree of
the vacuum is too high, the suction cup may damage the surface of the corrugated box.
1.4.5 Pneumatic Diagram
The diagram below describes how the compressed air is used to provide motion for the gripping device.
WARNING:
Do NOT use end-effector (such as suction cup) when it is overloaded, over energy loss or
over intended life.