TM Palletizing Operator User’s Manual Product Version: 1.0 / Document Version: 1.0 85
5.2.5.1 Changing Gripper Flange Position
To change the gripper flange position, simply perform the steps below:
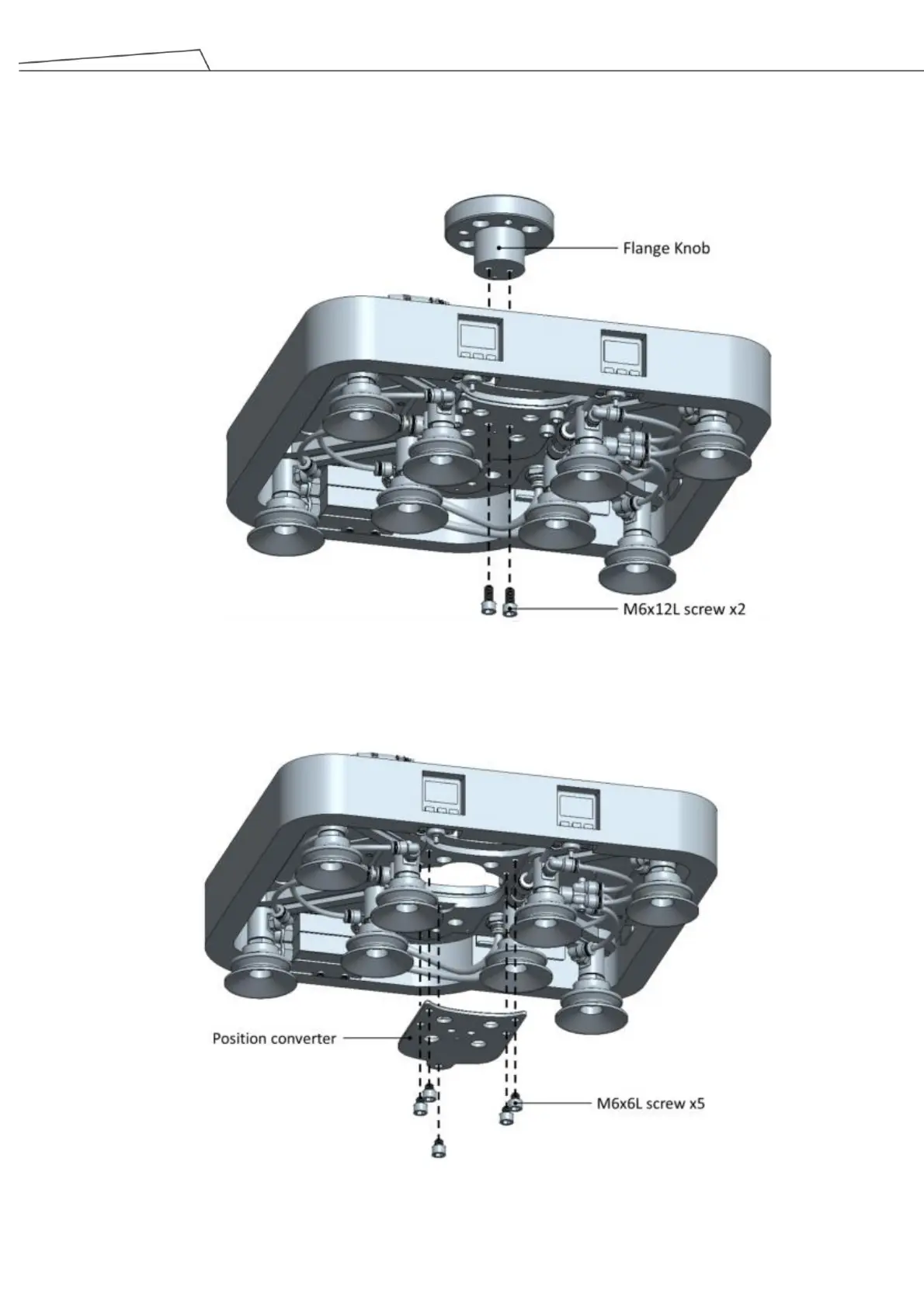
1. Remove the two M6x12L screws with Allen wrench and detach the flange knob from the gripper.
Figure 51: Remove two M6x12L screws and detach flange knob
2. Remove five M6x6L screws with Allen wrench and detach the position converter from the gripper.
Figure 52: Remove five M6x6L screws and detach position converter