TM Palletizing Operator User’s Manual Product Version: 1.0 / Document Version: 1.0 63
4.6 Safety Input/Output
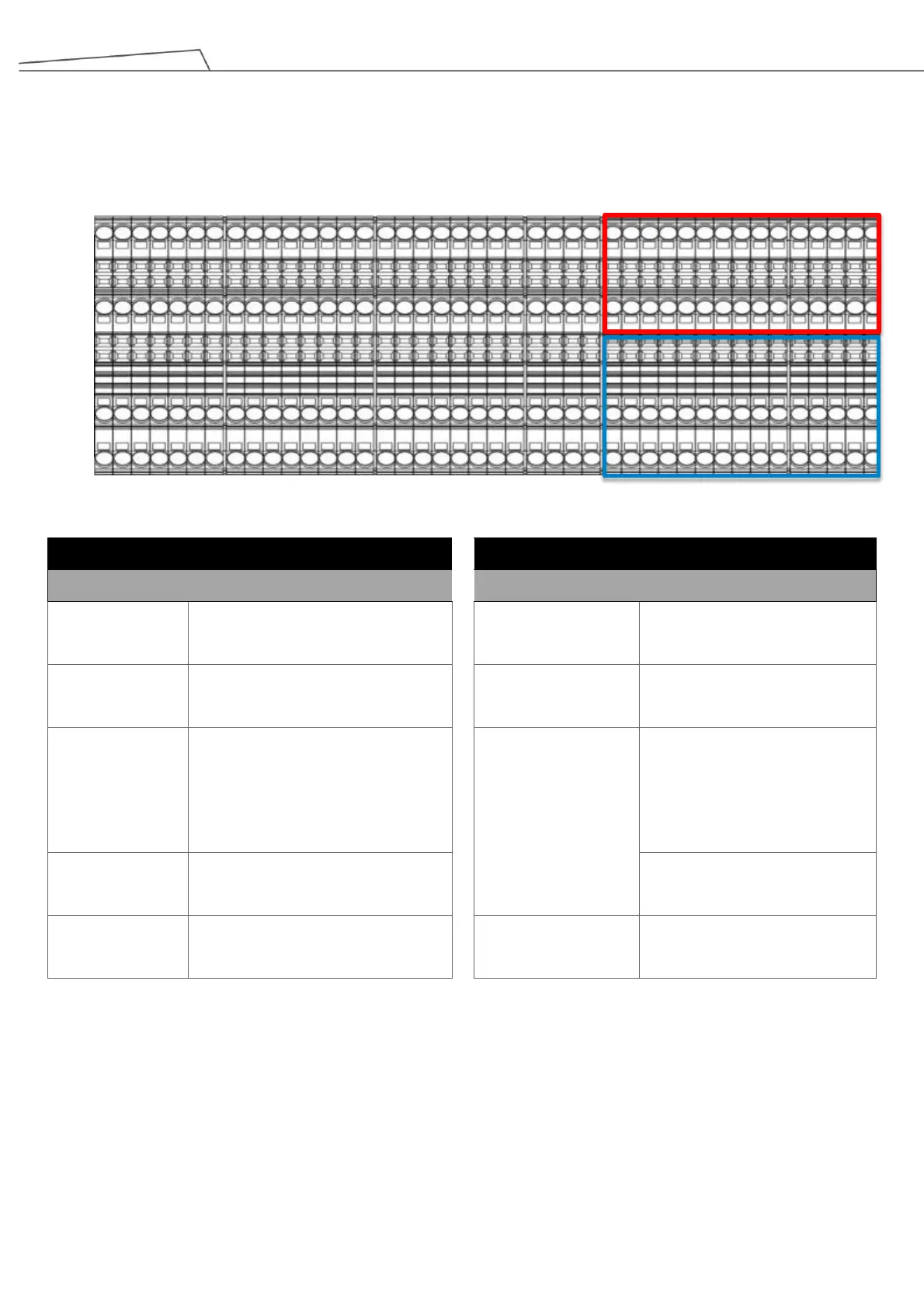
Below are Safety I/O pin assignments. The I/O highlighted in red are internally wired for robot control box
by default, while the I/O highlighted in blue come in both reserved and available I/O.
Input (all internally wired)
Internally wired to ESTOP Input
Available for users to connect to
Robot ESTOP Output
Internally wired to External
Safeguard Input
Available for users to connect to
External Safeguard Output
Internally wired to External
Safeguard Input for
Human-Machine Safety Settings
Available for users to connect to
External Safeguard Output for
Human-Machine Safety
Settings
Internally wired to Enabling Device
Input
Internally wired for Robot
Internal Protective Stop Output
Internally wired to ESTOP Input
without Robot ESTOP Output
Internally wired for Robot
Encoder Standstill Output
Table 18: Definitions of Safety I/O connectors