1-1
1. Structure
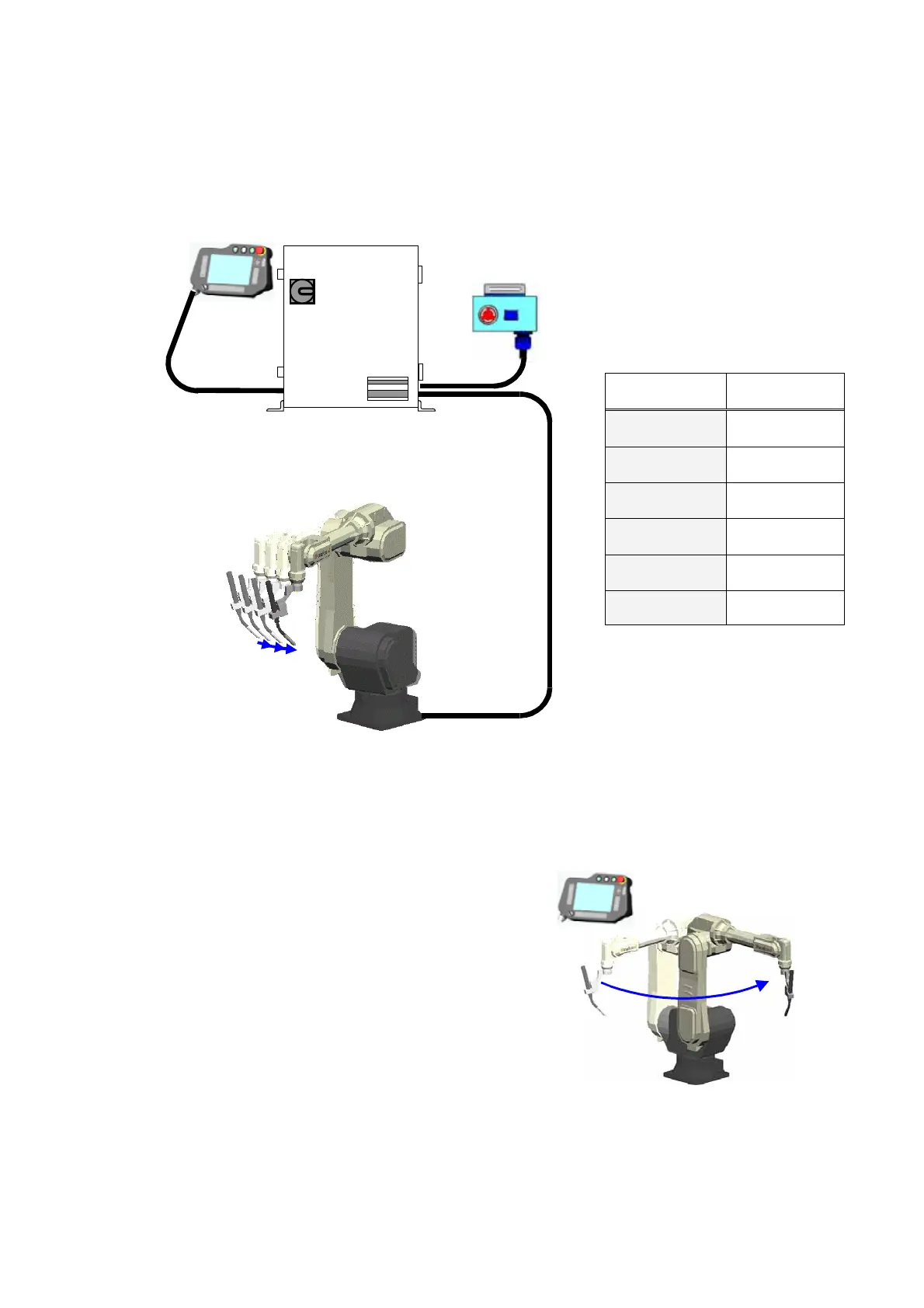
1-1. Parts identification
<*>
Operation box is standard
specification for specified models
only, otherwise optional.
Axis name Definition
RT axis Rotate Turn
UA axis Upper Arm
FA axis Front Arm
RW-axis Rotate Wrist
BW axis Bent Wrist
TW axis Twist Wrist
Robot manipulator
Teach pendant
Robot controller main body
RW axis
BW axis
TW axis
FA axis
UA axis
RT axis
Operation box
*
(The robot in the above figure is VR-008.)
1-2. Teaching Playback Method
The robot is a teaching playback robot.
A program of robot operation, such as welding or sequential
processing, can be created by moving the robot arm. This
process, known as “Teaching” can be stored in the controller.
By running the program, the robot executes the series of taught
operations (or playback the series of taught operations)
repeatedly. Therefore, accurate welding or processing is
possible continuously.