4-6
4-6. Teach program programming procedure
Perform the teaching operation to create a program of teaching data such as robot movement and task procedures.
[Operation flow]
1. Create a new file (program) where teaching data will be saved.
2. Perform teaching operation to create a program.
3. Perform trace operation to check and correct taught data during or after teaching operation.
4. Edit details during or after completion of teaching or trace operation to complete the program.
*Once completed, run the program in AUTO mode to move the robot.
4-6-1. Robot movement data.
Movement of robot arms is determined by following taught points stored as “teaching points” in a program. Each point
contains position data and data for robot travel method from the teaching point to the next teaching point with or without
welding.
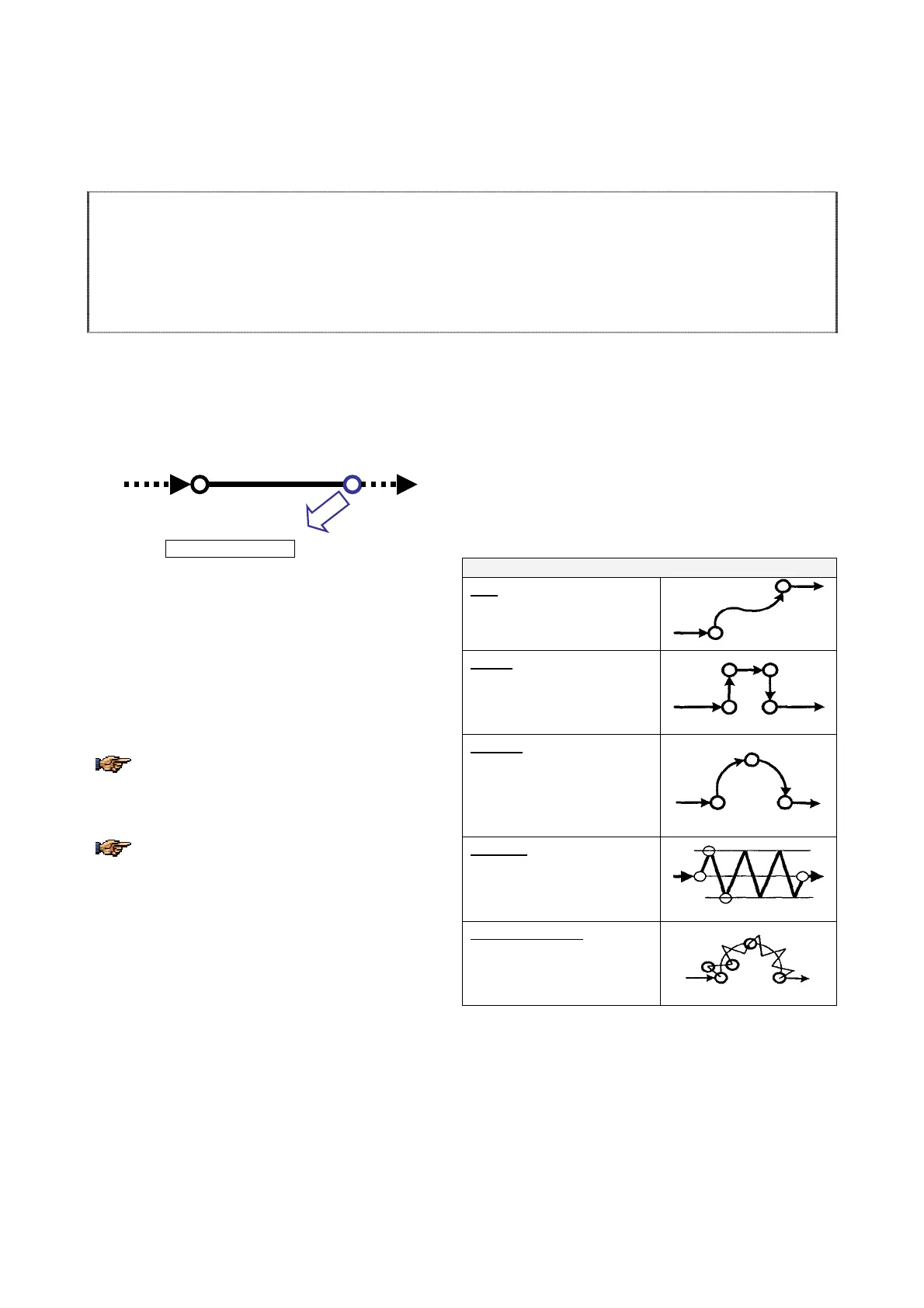
Interpolation
PTP
(MOVEP)
Joint movement
Linear
(MOVEL)
The robot follows a straight
path from a point to the next.
Circular
(MOVEC)
The robot follows a circular
path determined by three
teaching points
Weaving
(MOVELW)
The robot follows a zigzag
course on a straight path.
Data to be stored
• Position of the teaching point (coordinate
data)
• Travel speed toward the teaching point.
• Robot operation at the teaching point.
(Sequence commands)
• Travel method toward the teaching point.
(Interpolation)
Move commands (MOVEC, MOVELW etc.) for
circular or weaving movement of the robot are
stored in teaching points to specify the section of
each interpolation.
Weaving and circular-weaving are not available
for robots for handling specification.
Circular-weaving
(MOVECW)
The robot follows a zigzag
course on a circular path.