4-5
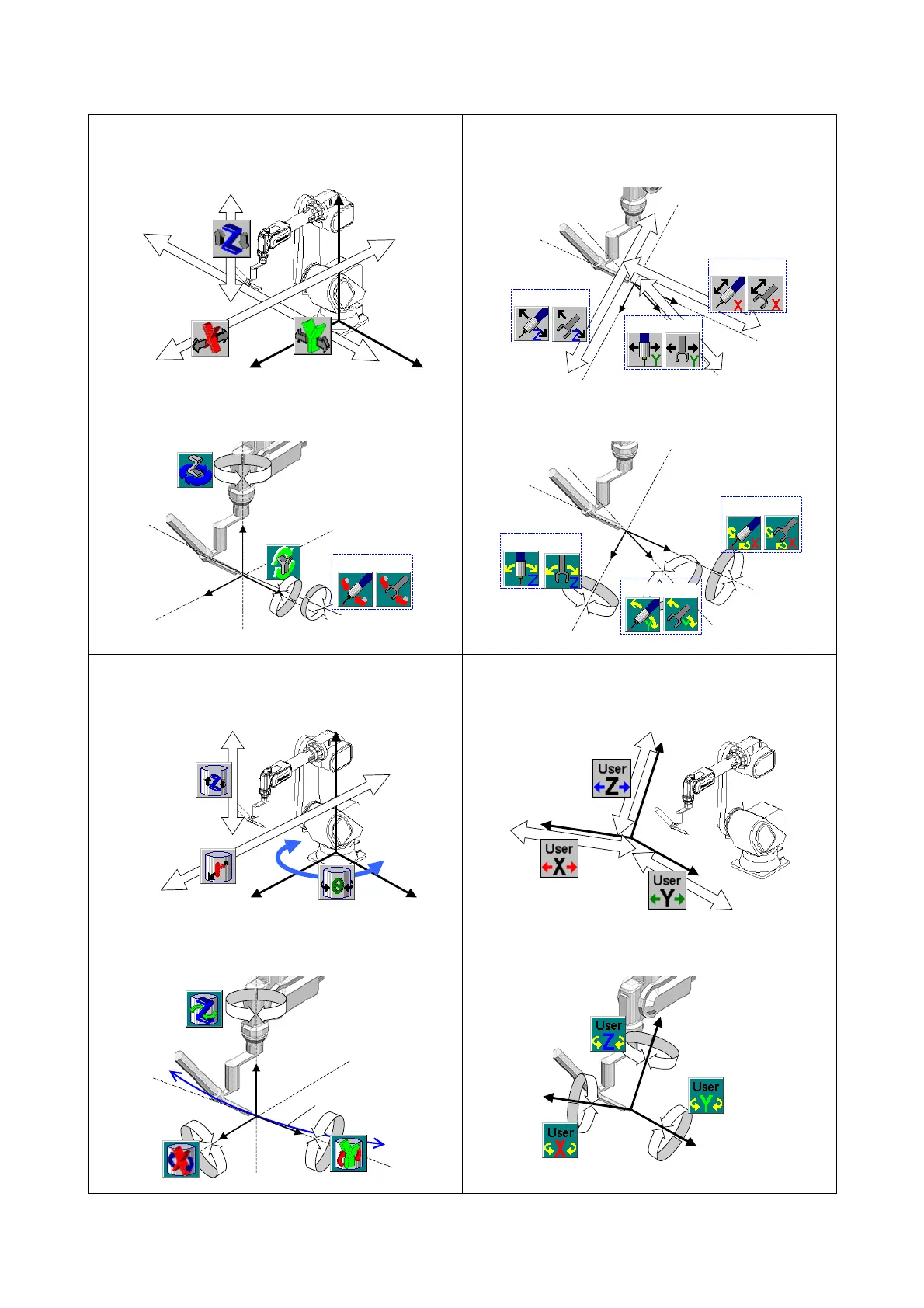
Cartesian coordinate system
[Controls the robot movement based on the robot
coordinate system]
Tool coordinate system
[Controls the robot movement based on the direction of
the end tool attached to the manipulator]
X
Y
Z
Ty
Tx
Tz
(W)
(H)
(W)
(H)
(W)
(H)
Switch functions (with L-Shift key)
Switch functions (with L-Shift key)
Direction of tool
(W)
(H)
(W): For welding, (H): For handling
Tx
Ty
Tz
(W)
(H)
(W)
(H)
(W)
(H)
(W): For welding, (H): For handling
Cylindrical coordinate system
[Controls the robot movement based on the cylindrical
coordinate system.]
User coordinate system
[Controls the robot movement based on the coordinate
system specified by the user.]
X
Y
Z
Xu
Yu
Zu
Switch functions (with L-Shift key) Switch functions (with L-Shift key)
X'
Y'
Z'
Y' touches the trajectory of RT.
Xu
Yu
Zu