10-2
10-2. Tool offset settings
10-2-1. What is tool offset
• Tool offset is the dimension surrounding the tool control point orientation of tool to be attached to the TW flange
surface of the robot, such as a welding torch or gripper.
• The robot calculates the position of its control point (tip of the tool) and the direction of the tool (the direction of
travel in the tool coordinate system) based on the values set up.
• If the tool offset is not correctly set, the robot cannot control travel speed of the tool tip or correct interpolation
movement (linear, weaving, etc.) during operation.
• Improper tool offset also causes improper movement when using malfunction in the tool coordinate system in
manual operation.
• The robot can handle up to 30 tool offset values and switch between them as needed during operation.
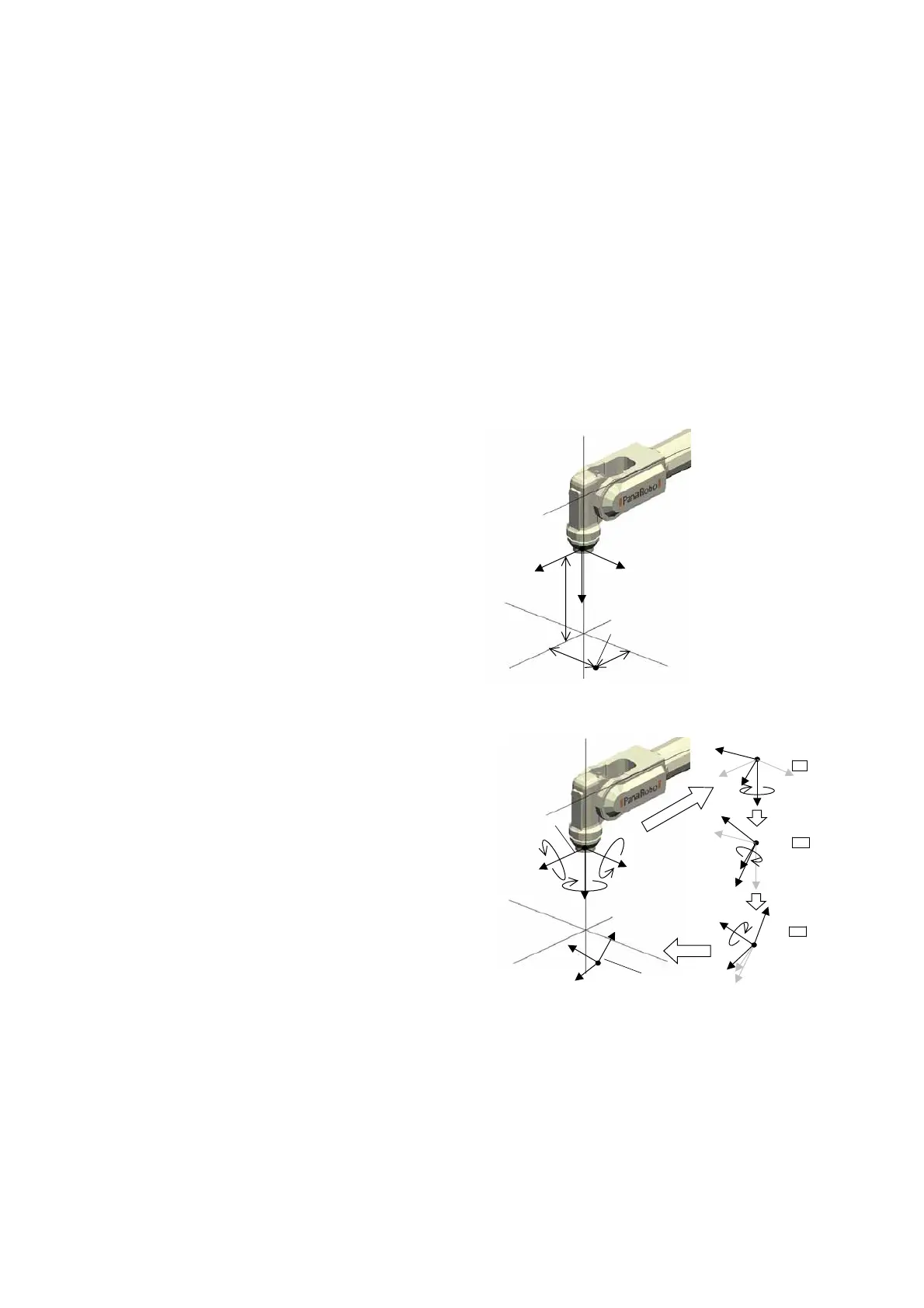
10-2-2. Definition of XYZ type tool offset
It uses 6 parameters, X, Y, Z, Tx, Ty and Tz, to
determine the tool offset.
The position of the control point is determined by the
parameters of X, Y and Z and is indicated by the
flange coordinate system (see the figure on the
right) whose origin is the TW-axis rotation center
on the flange surface
The direction of the tool coordinate is set by
parameters of Tx, Ty and Tz and is determined by
rotating the X, Y and Z axes in the order of Tx,
then Ty then Tz.
Control
point
Z
X
Fx
Fz Fy
Flange
coordinate
system
Direction of tool
Z
Tx
Tz
Ty
1
X-axis
rotation
(Tx)
2
-axis
rotation
(Ty)
3
Z-axis
rotation
(Tz)