4-14
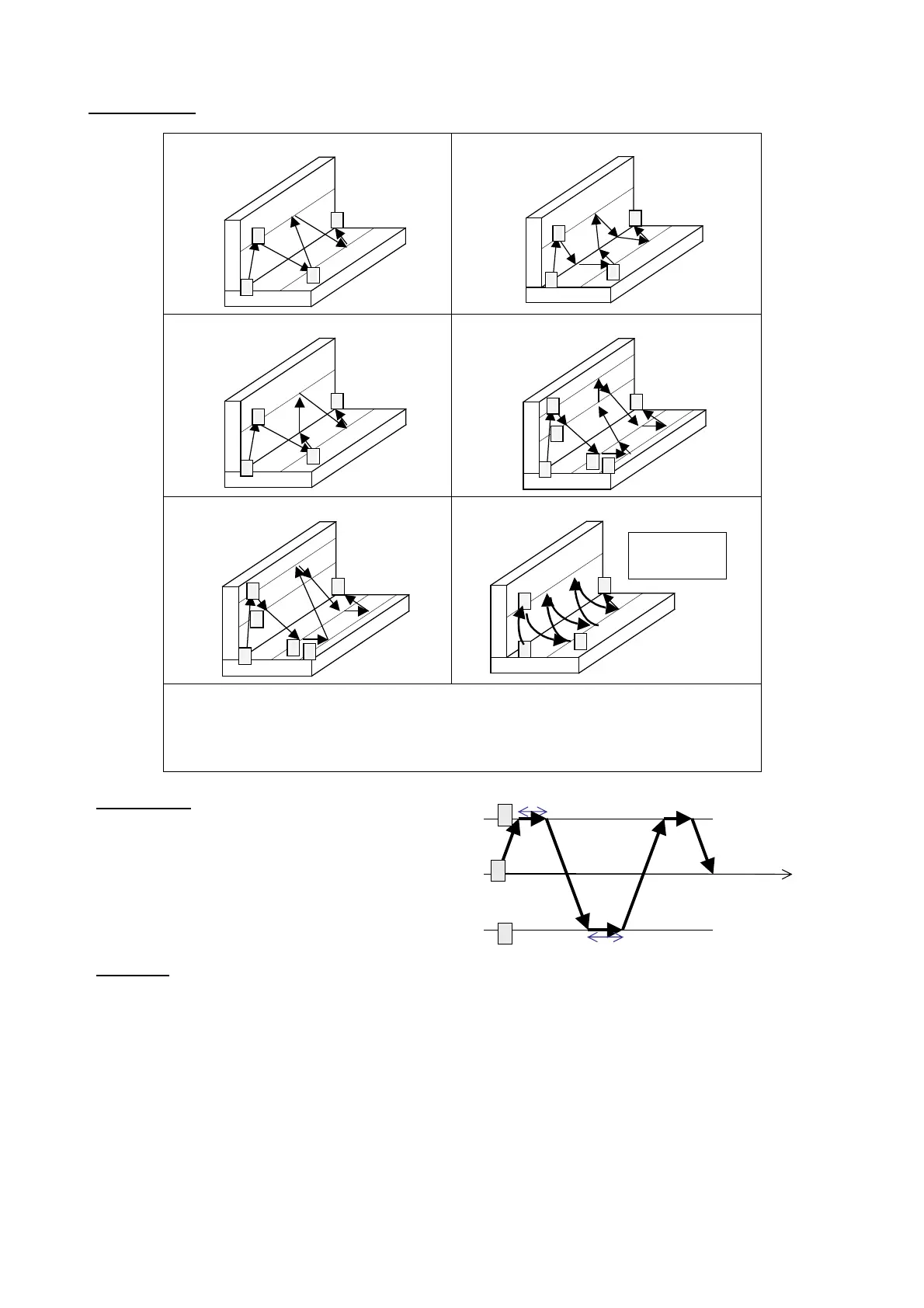
Weaving pattern
1
2
E
Pattern 1
(Single weaving)
S
1
2
E
Pattern 2
(L shape)
1
2
E
Pattern 3
(Triangular)
S
2
3
E
Pattern 4
(U shape)
1
4
2
3
E
Pattern 5
(Trapezoid)
1
4
1
2
E
Pattern 6
(High-speed single weaving)
Move to the
amplitude points
with “PTP” motion.
◎ Specify the frequency of the weaving speed on the weaving end point.
◎ In case of the welding section, specify the weaving speed at ARC-SET command.
◎ Specify the weaving pattern on the weaving start point.
◎ Specify the motion speed in the direction of the main trace on the weaving end point.
Weaving timer
It determines how much time (in seconds) the robot
waits before traveling to the other amplitude point.
During the period specified by the timer, the robot
travels forward in the direction of the main trace.
2
1
S
Timer 1
mer
Main trace
Conditions
• For patterns 1 to 5: [Amplitude × Frequency] must not exceed 60 mm・Hz
• For pattern 6: [Angle of swing × Frequency] must not exceed 125 ° Hz
• [1/f −(T0+T1+T2+T3+T4)> A] must be satisfied.
where, f: Frequency (unit: Hz)
T0: Timer set value saved in the weaving start point.
T1 to T4: Timer set values of amplitude points 1 to 4.
A= 0.1 (for patterns 1, 2 and 5),
= 0.75 (for pattern 3),
= 0.15 (for pattern 4),
= 0.05 (for pattern 6)