Chapter 9 Inverter Functions
9-5-13
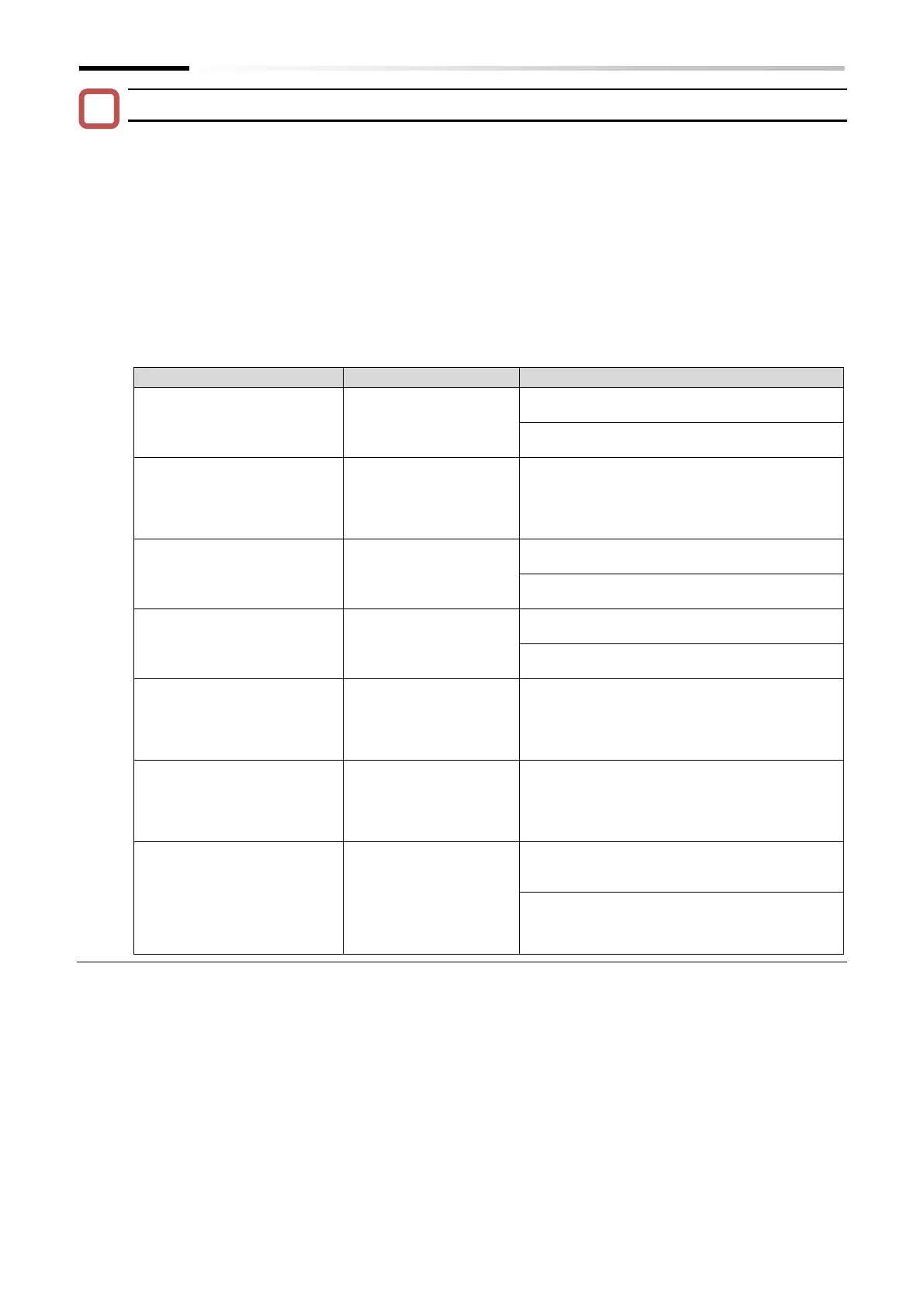
Adjustments when using sensorless vector control
If the desired characteristics cannot be obtained, first execute auto-tuning to set the motor
constant. Then, apply adjustments referring to the table below.
Before adjusting the "Async. Motor speed response [H005]
*1
", set the "Async. Motor constant J
[H024]/[H034]
*1
" to the sum of the moment of inertia of the load applied to the motor shaft and
the moment of inertia of the motor.
Overcurrent and other issues may occur if motor rotation is obstructed due to motor locking
from braking or interference from foreign objects. If this cannot be resolved with adjustments,
try checking around the motor's periphery.
If the "Output frequency monitor [d001]" changes significantly under load, a function that makes
automatic changes to the frequency, such as the overload limit function, non-stop operation
during instantaneous power failure, or the overvoltage suppressor, may have been triggered
under certain function settings. For details, refer to "Chapter 15 Tips/FAQ/Troubleshooting".
Example of countermeasures
The speed response of
the control system is
too high.
Decrease the "Async. Motor speed response
[H005]
*1
" in 5% increments.
Decrease the "Async. Motor constant J [H024]/
[H034]
*1
" in 5% increments.
Rotation momentarily occurs
in the reverse direction to
the specified direction of
rotation at startup, or during
low-speed operation.
The result of the motor
control causes a reverse
rotation command to be
momentarily issued.
Enable "Direction reversal protection selection
[b046]".
Rotation is unstable and
uneven when operating at
low speeds.
The speed response of
the control system is
too low.
Increase the "Async. Motor speed response
[H005]
*1
" in 5% increments.
Increase the "Async. Motor constant J [H024]
/[H034]
*1
" in 5% increments.
Hunting occurs in the motor.
The speed response of
the control system is
too high.
Decrease the "Async. Motor speed response
[H005]
*1
" in 5% increments.
Decrease the "Async. Motor constant J [H024]
/[H034]
*1
" in 5% increments.
The rotation frequency
decreases when a load
(power running) is applied to
the motor in the stop
direction.
The motor constant R2
has been set too low.
Increase the "Async. Motor constant R2 [H021]
/[H031]
*1
" in 5% increments up to 1.2 times
the set value.
The rotation frequency
increases when a load
(power running) is applied to
the motor in the stop
direction.
The motor constant R2
has been set too high.
Decrease the "Async. Motor constant R2
[H021]/ [H031]
*1
" in 5% increments down to 0.8
times the set value.
The rotation frequency
increases when a load
(regenerative running) is
applied to the motor in the
direction of rotation during
low-speed operation (at
several Hz).
Regenerative torque is
insufficient for low-
speed operation.
Increase the "Async. Motor constant R1 [H020]
/[H030]
*1
" in 5% increments up to 1.2 times
the set value.
Increase the "Async. Motor constant I0 [H023]
/[H033]
*1
" in 5% increments up to 1.2 times
the set value.
*1. "2nd-motor control [SET]" target parameter. The second control parameter is also subject to setting.

 Loading...
Loading...








