Chapter 9 Inverter Functions
9-14-13
9.14.4 Operating Simple Position Control with Brake Control
How to link an external brake with the system to operate when the positioning operation is
completed?
How to apply a brake to prevent position misalignment after moving the work piece by the
position control?
In the simple position control mode, the simple position control is automatically linked with the
brake control when "Brake control enable [b120]" is "Enable (DC braking enabled at stop when
position control is enabled) (01)" or "Enable (DC braking disabled at stop when position control
is enabled) (02)".
When using this function, assign "Brake release [BRK] (19)" to the output terminal.
When operating this function while interlocking by inputting an engagement/release check
signal from an external brake to the inverter, assign "Answer back from brake [BOK] (44)" to the
input terminal and set "Brake confirmation signal wait time [b124]". If necessary, assign "Brake
error [BER] (20)" to the output terminal.
Refer to "9.7.10 Starting and Stopping with External Brake Control" and "9.14.1 Overview of
Simple Position Control Function and Basic Settings" respectively, and make appropriate
settings accordingly.
During deceleration, when the "Creep speed [P015]" is reached, the brake is engaged to turn off
the "Brake release [BRK] (19)" and the motor stops. Therefore, it stops before the actual target
position (before the point of "Position displacement at creep speed [P014]" at maximum
stopping distance). Set "Position displacement at creep speed [P014]" and "Positioning
completed range [P017]" considering the accuracy of the stop position.
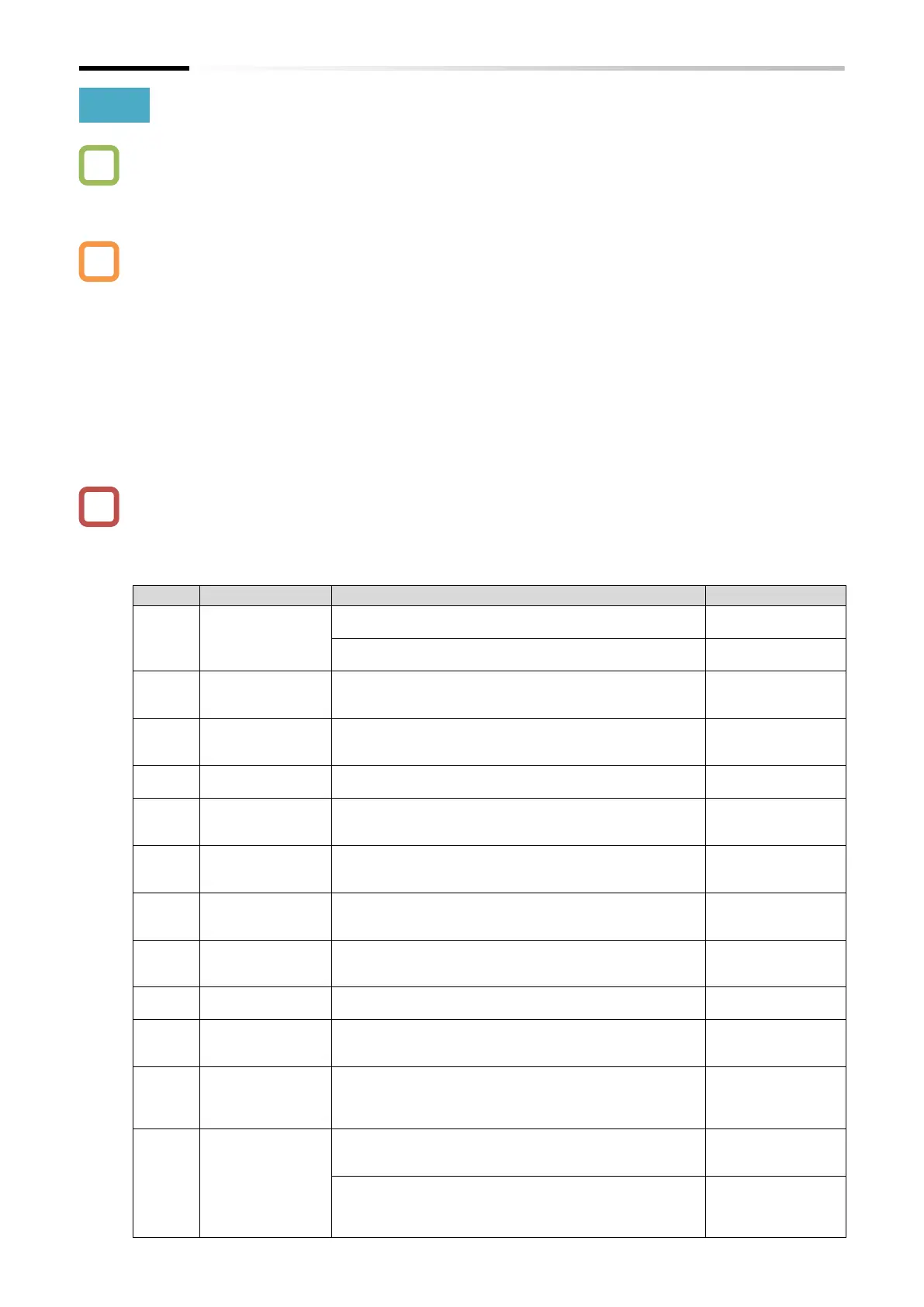
Enabled (DC braking enabled at stop when position
control is enabled)
Enabled (DC braking disabled at stop when position
control is enabled)
Sets the time required for the output current to reach
the brake release current after the brake release
frequency is reached.
Brake wait time
for accel.
Sets the mechanical delay time from the brake
confirmation signal (or the brake release signal) is
received until the brake is released.
Brake wait time
for stopping
Sets the mechanical delay time from the brake release
signal is turned off until the brake is engaged.
Brake
confirmation
signal wait time
Set the time or longer from the brake release signal is
output until the release completion signal output from
the brake is received by the inverter.
Sets the output current at which the brake release is
permitted. Note that a lower value may not produce
sufficient torque when the brake is released.
(0.0 to 2.0) ×
Rated current (A)
Simple
positioning
selection
Sets to enable the simple position control.
Position
displacement at
creep speed
Sets the amount of movement at which it operates at
the speed of [P015], with one motor rotation treated
as 100%.
Sets the low-speed operation immediately before the
positioning is completed.
Minimum frequency
[b082] to 10.00 (s)
Positioning
completed range
When the current position falls within the target
position ± [P017] range, positioning is considered
completed, and [POK] is output. (Multiplier of 4)
Answer back from Brake [BOK]:
This checks the input signal using the answer
returned for the [BRK] output signal to the external
brake.
Brake release [BRK]:
It is the signal for an external brake
engagement/release.
Brake error [BER]:
Turns on in the event of a sequence error for the
brake control function. When this signal is turned
on, the inverter trips with the "Brake error [E36]".

 Loading...
Loading...








