Chapter 9 Inverter Functions
9-8-5
3 Setting the PID target value input source and feedback input source
Set the PID feedback value input source with "PID feedback input source selection [A076]",
and the PID target value input source with "Frequency input source selection [A001]
*
"
.
If the PID feedback input source is "[Ai2] terminal input (00)" or "[Ai1] terminal input (01)",
and the PID target value input source is "Control terminal (01)", the "AT selection [A005]" will
be disabled, and the analog input not set by [A076] becomes the target value input source.
(Example) If [A076] is "[Ai2] terminal input (00)" and [A001] is "Control circuit terminal
block (01)", the PID target value input source is the [Ai1] terminal input.
If the PID feedback value input source is "Modbus communication (02)", write the feedback
value in the holding register address 0006h, with 10000 being 100%.
(Note) This register is only writable when [A076] is set to "Modbus communication (02)".
If the PID target value input source or PID feedback value input source is "Pulse input", the
value retrieved is converted to a percentage of the maximum frequency (100%), with the
maximum frequency being the pulse frequency set in "Pulse frequency scale [P055]". For
details on pulse frequency commands, refer to "9.2.8 Setting Pulse Input as the Frequency
Command Input Source".
If the PID target value input source or PID feedback value input source is the "Calculation
function result," refer to "9.2.11 Setting a Calculation Operation on Two Frequency
Commands as the Frequency Command Input Source" for details.
4 Setting and adjusting proportional gain, integral gain, and derivative gain
Set the "PID proportional gain [A072]", "PID integral gain [A073]," and "PID derivative gain
[A074]" according to the actual control target.
If the response is not stable in PID operation, refer to the procedure below to make
adjustments.
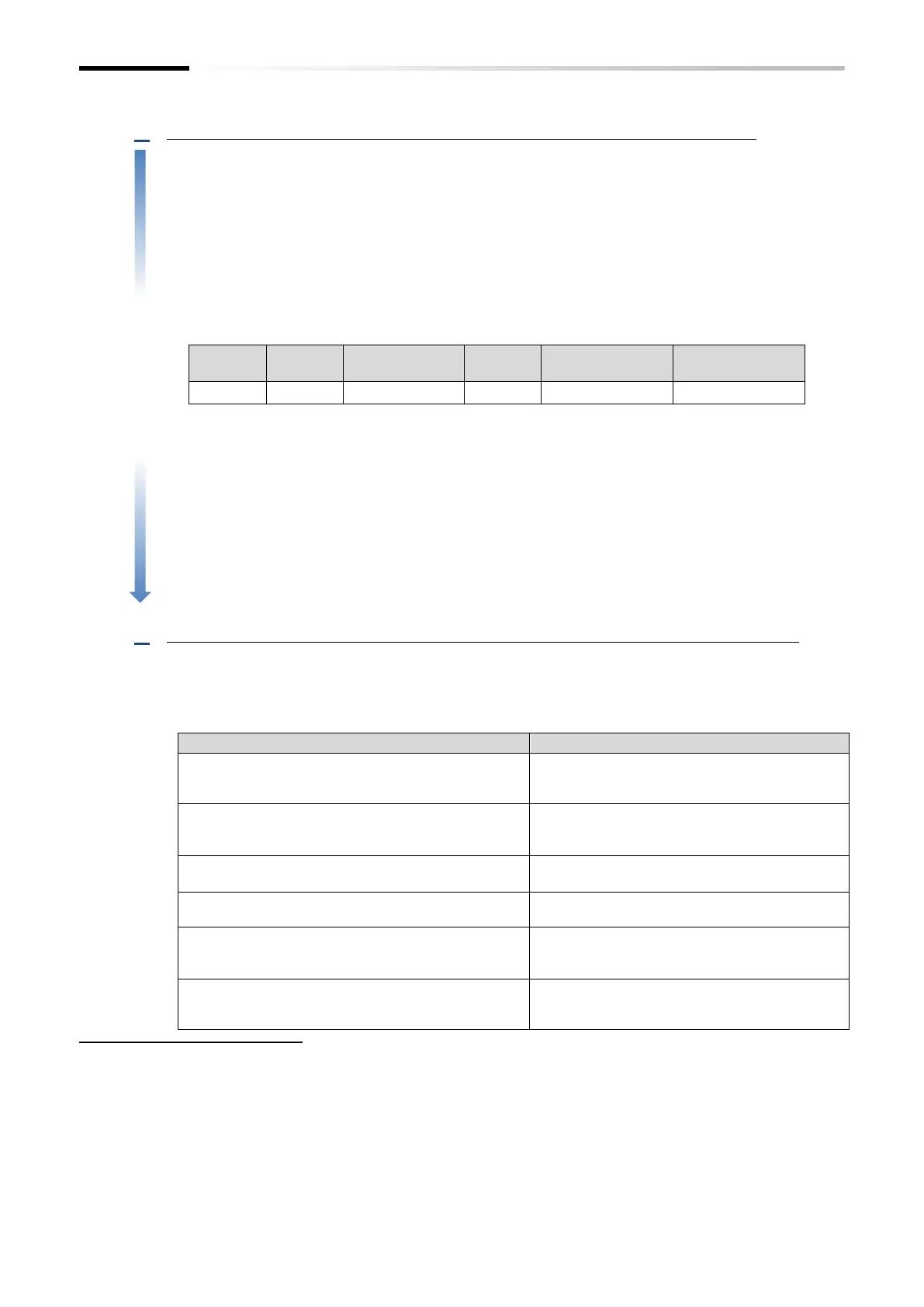
Example of countermeasures
Even when the PID target value fluctuates,
output response is slow, and the feedback value
changes slowly.
Increase the "PID proportional gain [A072]".
Feedback values change quickly and are not
stable.
Overshooting and hunting occur.
Decrease the "PID proportional gain [A072]".
Feedback values gradually fluctuate.
There is a delay before operations stabilize.
Increase the "PID integral time constant
[A073]".
The PID target value and feedback value do not
match easily.
Decrease the "PID integral time constant
[A073]".
There is a slow response even when proportional
gain is increased.
Small-scale hunting occurs.
Increase the "PID derivative gain [A074]".
There is a greater susceptibility to external
disturbances, and operations take longer to
stabilize.
Decrease the "PID derivative gain [A074]".
. "2nd-motor control [SET]" target parameter. The second control parameter is also subject to setting.

 Loading...
Loading...








