D2 Series Servo Drive User Manual Drive Configuration
HIWIN MIKROSYSTEM CORP. 5-15
(3) Dual-loop encoder
HIWIN dual-loop model supports the 17-bit multi-turn absolute encoder (the 9-th bit of motor model
name is 4) and the digital AqB linear encoder. Its encoder configuration page is given in figure
5.2.2.1.2.
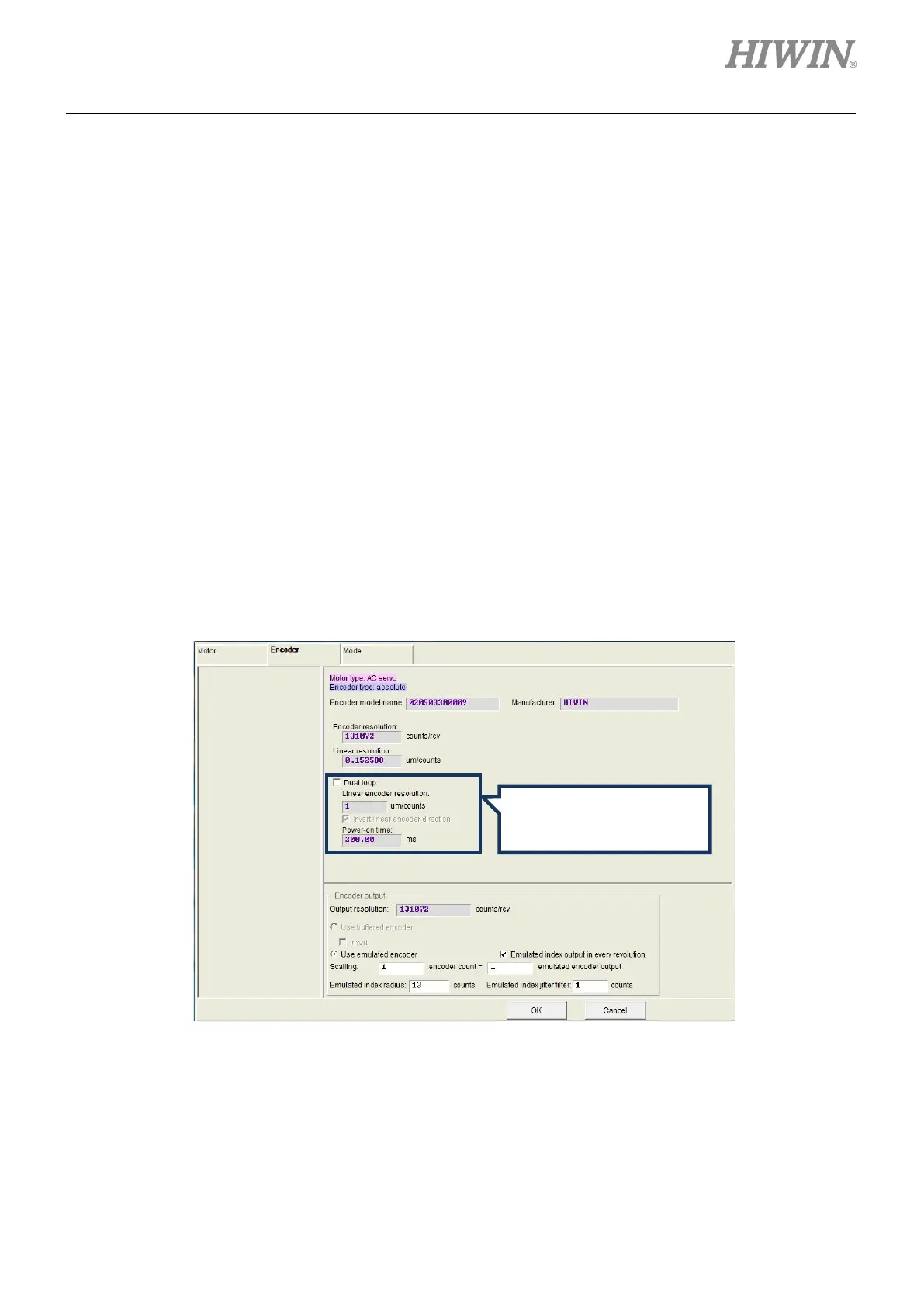
a When the option of “Dual loop” is not checked, the setting method for the serial encoder is
adopted. The drive will read encoder parameters automatically, and users do not set them by
manual. The option of “Use emulated encoder” only can be set in the “Encoder output” area.
Users can decide whether to use the function of “Emulated index output in every revolution” by
clicking this option. Details refer to Section 5.2.2.3.
b When the option of “Dual loop” is checked, users must key in the resolution of linear encode, as
shown in figure 5.2.2.1.3. If some encoders are powered on longer, the delay time should be set
in the “Power-on time” field based on their specification to avoid occurring encoder error during
the boot process. Moreover, there are two options of “Use buffered encoder” and “Use
emulated encoder”, that can be chosen in the “Encoder output” area. These two output modes
adopt the position signal of linear encoder. At this moment, the function of “ Emulated index
output in every revolution” is invalided, and the option is anti-gray and cannot be checked.
Figure 5.2.2.1.2 Encoder configuration page for dual-loop encoder (the “Dual loop” option is not checked)
This area only can be set
after the “Dual loop” option
 Loading...
Loading...

