D2 Series Servo Drive User Manual LCD Operation
HIWIN MIKROSYSTEM CORP. 7-29
Note:
In the force/torque mode, the “JOG” speed for LCD operation is based on the “Speed” set in the motion protection,
but not based on “VEL_LC” set in the LCD actions page.
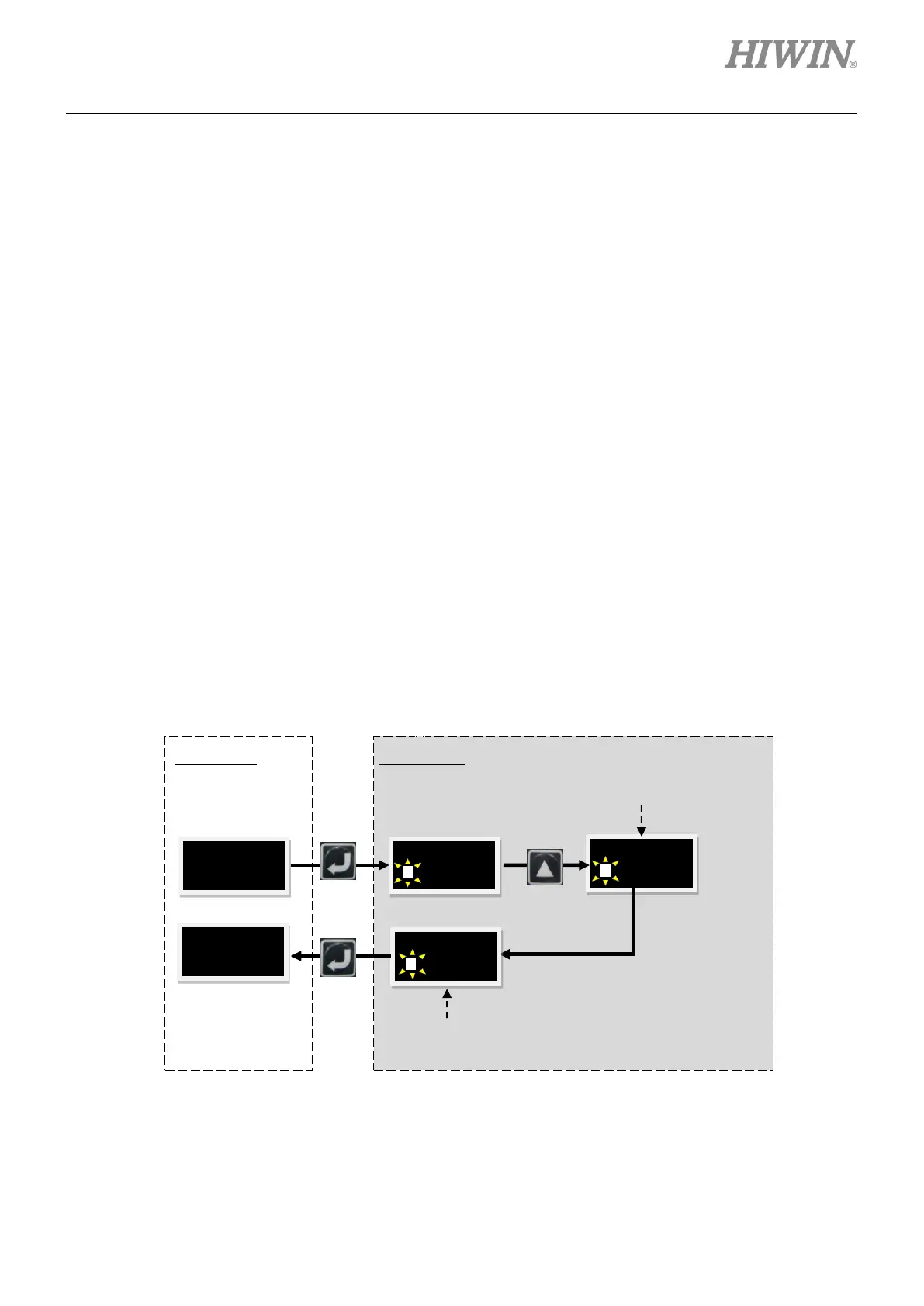
7.6.3 Absolute coordinate motion
Use following steps to perform the action of moving to absolute target position. The operation flow chart is
given in figure 7.6.3.1. Take the absolute coordinate of target position being 2,000 as an example.
Step 1: Press the Up key or Down key to enter the “MOV PO” option for setting target position. Refer to
Section 7.5.2 for the editing method. In this example, the target position will be set to 2,000.
Step 2: Move to the “MOV2PO” option and press the Enter key (the dynamic cursor appears on the left
side of the second line). The current position is displayed, but the motor does not yet start
moving.
Step 3: Press the Up key to start moving. The motor moves to the target position set in “MOV2PO” with
the speed set in “VEL_LC”. The feedback position (“01FB PO”) is displayed on the second line
of LCD screen during motion. To stop the movement during motion, just press the Enter key. To
continue the motion, just press the Up key to continue moving to the original set target position.
Step 4: Press the Enter key to return to LEVEL ONE.
Figure7.6.3.1 Operation of absolute coordinate motion (“MOV2PO”)
displayed on the LCD
screen during motion.
The target position 2,000 will be displayed
on the LCD screen when the motor reaches

 Loading...
Loading...
