Drive Tuning D2 Series Servo Drive User Manual
6-46 HIWIN MIKROSYSTEM CORP.
6.7.5 Spectrum analysis
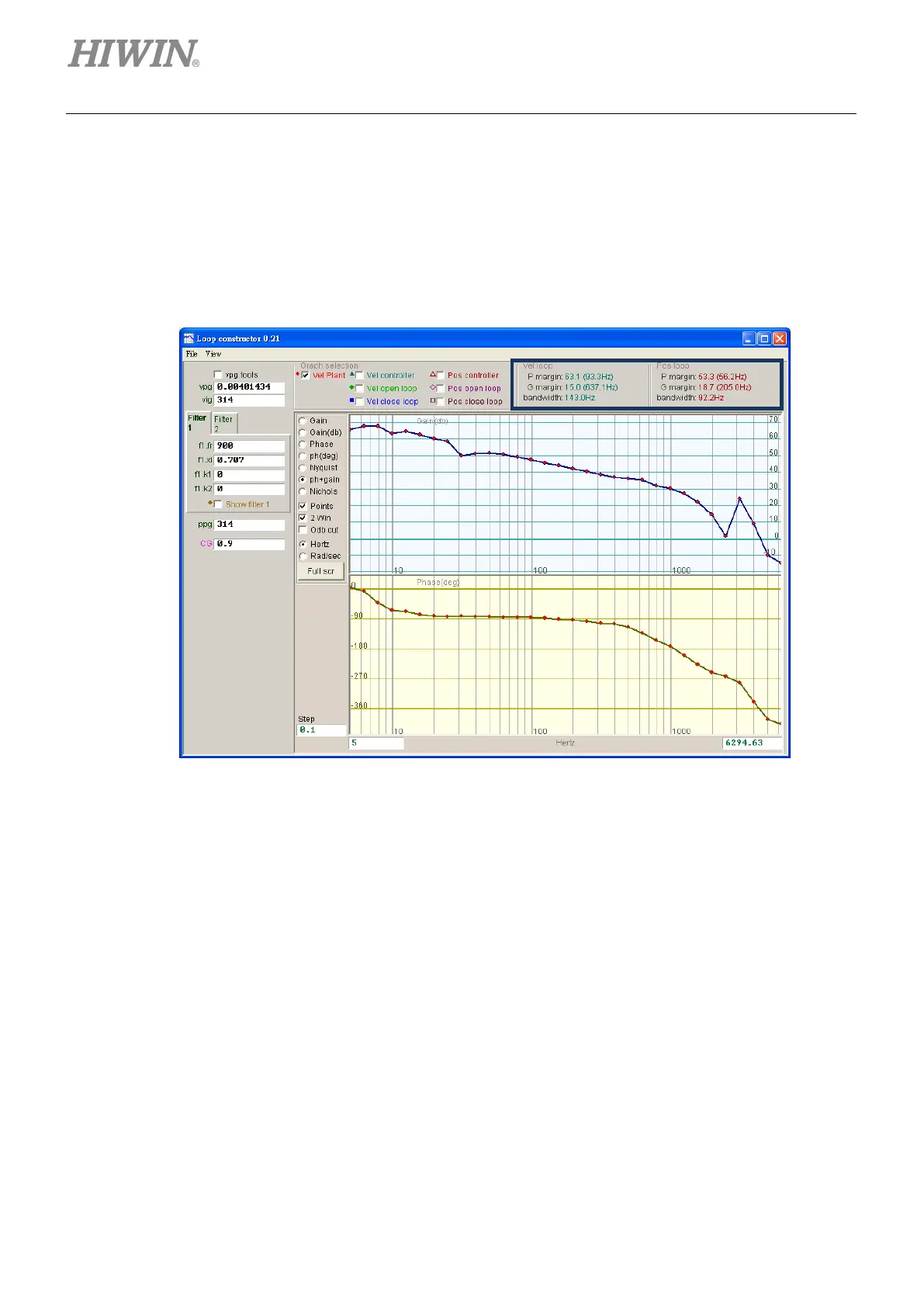
“Loop constructor” provides the gain margin, phase margin, and bandwidth of velocity loop and position
loop. This function can be used to tune gains to simulate the stability of control system after gain tuning,
as shown in figure 6.7.5.1. Here, “P margin” is the phase margin, and “G margin” is the gain margin. Refer
to Section 3.6 for more information.
Figure6.7.5.1 Loop constructor - P margin and G margin
6.8 Encoder signal confirmation
The encoder plays an important role in the servo motor control, which provides the information about
drive position or angle to achieve the servo loop control. For D2-series drives, the encoder output signal
can be ensured via HMI.

 Loading...
Loading...
