Operation Principles D2 Series Servo Drive User Manual
3-6 HIWIN MIKROSYSTEM CORP.
Figure3.3.2
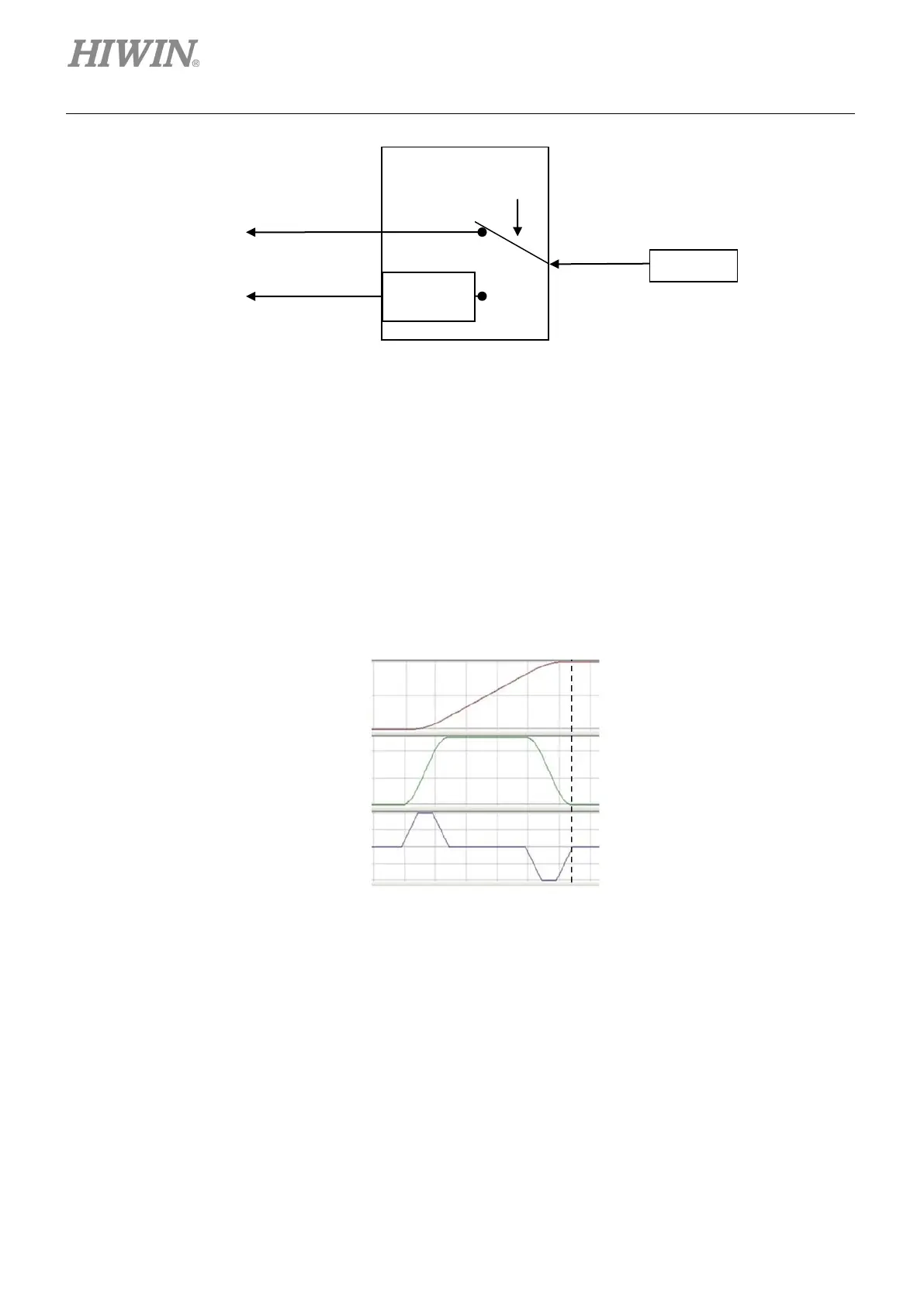
3.4 Path planning
The main purpose of path planning is that the host controller calculates the suitable motion command
based on the user’s actual requirement of distance, velocity, acceleration, and smooth factor, as shown in
figure 3.4.1. This command (pulse or V command) is sent to the drive by the host controller, or calculated
by the drive itself (stand-alone mode). Different configurations are adopted according to different
applications.
Figure3.4.1
(1) Position
The encoder provides the position information of motor to the drive, such that the drive can realize
the current motor position. For the linear motion, common position units are um, mm, and m; while
for rotary motion, it is the encoder count. For D2 drive, “Reference position” denotes the position
command, which is calculated by the path generator based on the related parameters. However,
“Target position” is the target position set by the user or host controller. After this parameter is sent to
the drive, normally, it needs to be calculated by the path generator so as to let motor move.
Switchable
Encoder
Encoder
Output
 Loading...
Loading...

