D2 Series Servo Drive User Manual Protection Function
HIWIN MIKROSYSTEM CORP. 8-5
The value of “Smooth factor” is between 1 and 500. The higher the value is, the smaller the impact
is. The value of 1 means no smooth function. In some cases, increasing the smooth factor will be
helpful for the final settling performance of positioning process due to the impact reduction of motor
force. However, the smoother motion inevitably increases the move time (see Section 3.7). How to
obtain the balance between the two must be practically tested and tuned in the machine.
8.2 Position and velocity errors protection
8.2.1 Position error limit
There is a position error in the servo control. The position error is usually larger when the motor moves.
Moreover, some external factors may also cause that the position error becomes abnormally large, such
as that bearings or linear guideways on the mechanism have a high friction due to the lack of lubricators,
the winding or cable tray is too tight, foreign objects invades on the motor travel, the motor hits the
abnormal object or hard stop, the position encoder is abnormal or interfered, and other conditions. In
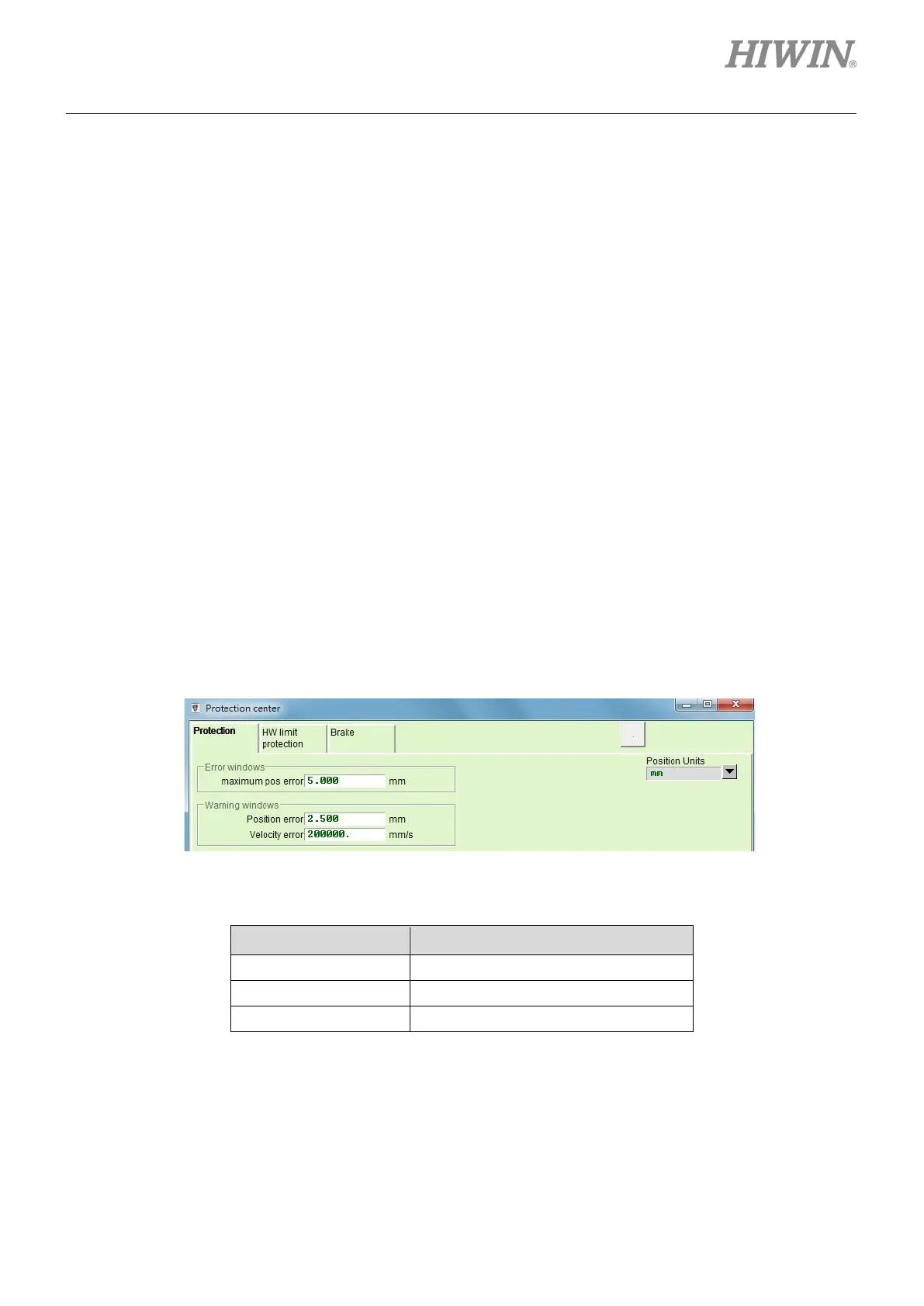
order to avoid all kinds of anomalies leading the position error too big, D2 drive has a “Error windows”.
When the position error is over this “Error windows”, the drive will generate an error message of “Position
error too big”, start the emergency stop procedure, send the brake signal, and disable the motor.
Figure8.2.1.1
Table8.2.1.1
Parameter Description
Maximum Pos Error Maximum position error limit
Position error warning value
Velocity error warning value
If the drive is the dual-loop model and uses the dual-loop function, the “Protection” tab in the protection
center has a “Hybrid deviation error” field to be set to prevent the mixed control deviation from being too
large, as shown in figure 8.2.1.2. This may cause the velocity loop or position loop becomes unstable.
When the actual error exceeds this set, the drive generates an error message of “Hybrid deviation too
big”. If the dual-loop function is not used, the “Hybrid deviation error” field is anti-gray and cannot be set.

 Loading...
Loading...
