D2 Series Servo Drive User Manual Drive Tuning
HIWIN MIKROSYSTEM CORP. 6-27
6.6.3 Schedule gains and velocity loop gain
Schedule gains
A complete motion can be roughly divided into three phases (see Section 3.7):
(1) Move: From the start to the end of path planning.
(2) Settling: From the end of path planning to the in-position phase.
(3) In-position: Output an in-position signal.
The main purpose of “Schedule gain” is to adjust the output servo stiffness of each motion phase
(“Move”, “Settling”, “In-position”) by changing the servo gain. The gain of each phase is adjusted in
proportion. When it is set to 1, it means that the original servo gain is used. When it is less than 1, the
gain of this phase is lowered. The corresponding parameter of each phase is given as follows.
(1) Move: sg_run.
(2) Settling: sg_stop.
(3) In-position: sg_idle.
If “CG” = 0.5 and “sg_run” = 1.2, this means that the actual servo gain in the “Move” phase is
changed to 0.5 x 1.2 = 0.6.
The “Settling” and “In-position” phases use the same setting method to change the originally fixed
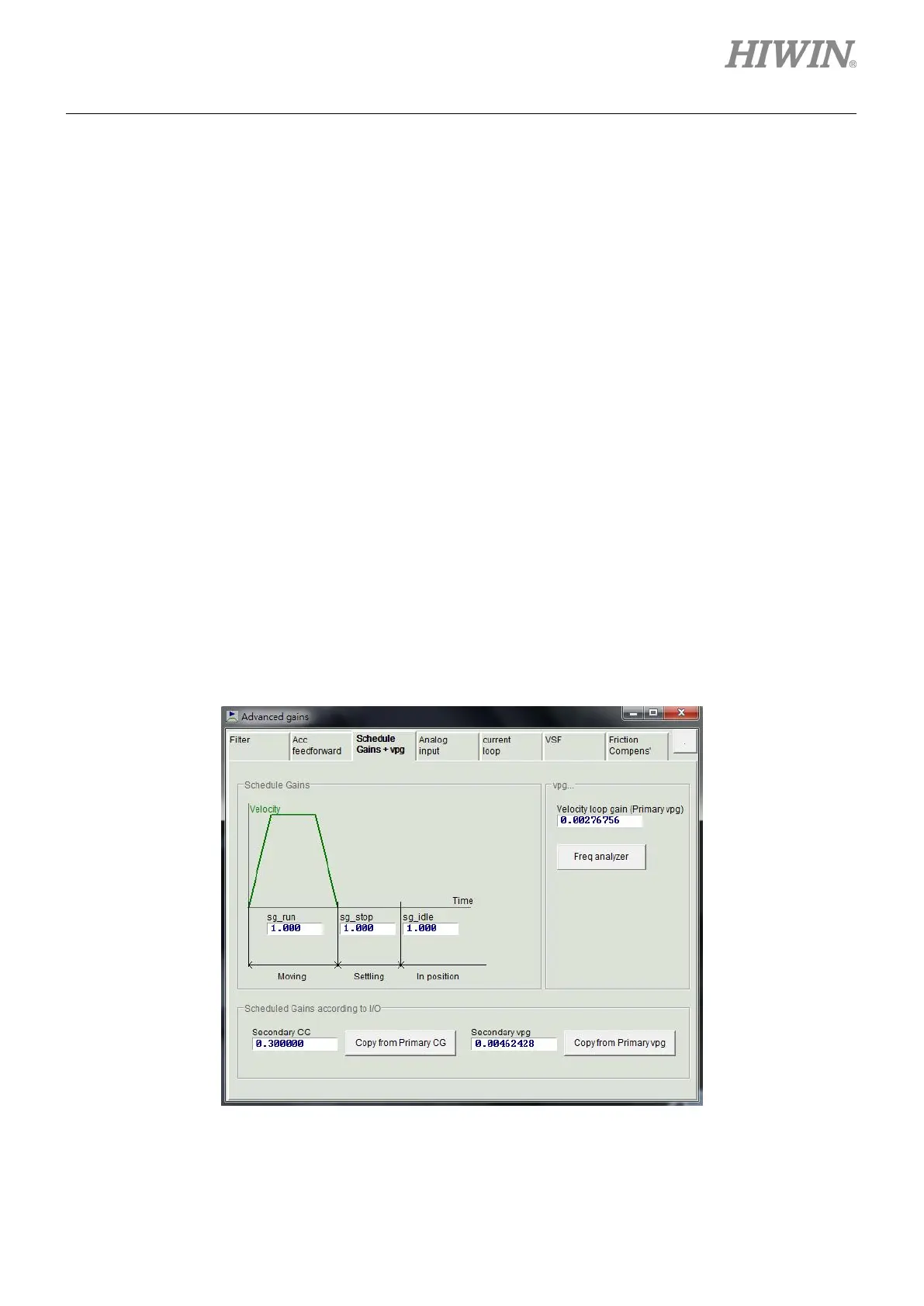
servo gain to the gain met the different requirement in each motion phase via “Schedule gains”.
Figure6.6.3.1 Schedule gains
 Loading...
Loading...

