D2 Series Servo Drive User Manual Drive Tuning
HIWIN MIKROSYSTEM CORP. 6-57
6.10 Backlash compensation
If the platform moves in a fixed direction and stops, it does not move immediately when it needs to move
in the opposite direction. The platform stays at the original position until the motion command is
accumulated to a certain amount to start moving. This is called the backlash error. Go to the “Backlash”
tab. The backlash compensation setting is given in figure 6.10.1. This setting can be used for backlash
compensation to improve the bi-direction reproducibility.
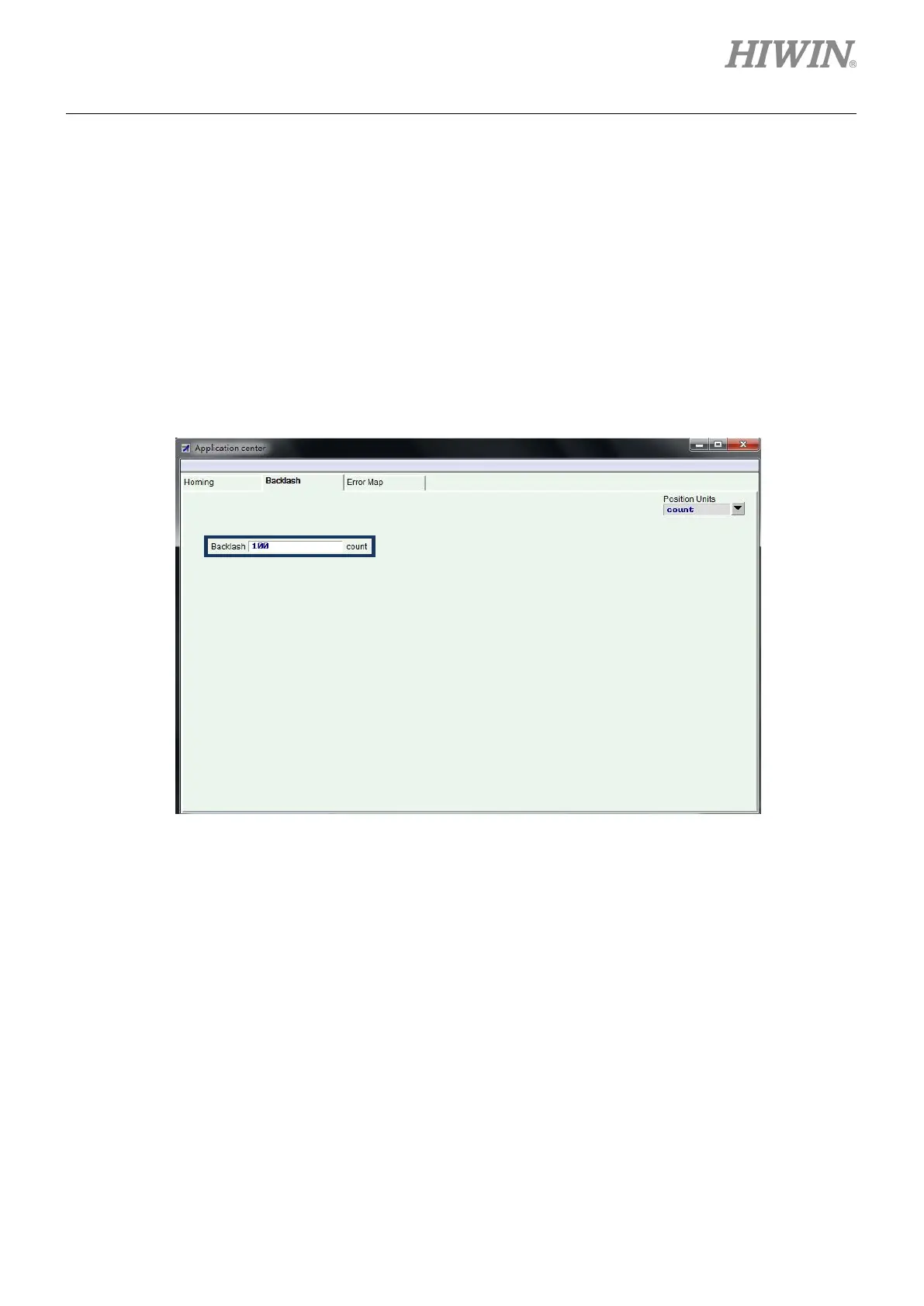
Backlash function setting
Enter the measured backlash value into this field to complete the backlash compensation setting.
Figure6.10.1 Backlash compensation window
 Loading...
Loading...

