Operation Principles D2 Series Servo Drive User Manual
3-8 HIWIN MIKROSYSTEM CORP.
3.5 Servo loops and gains
(1) Servo loops
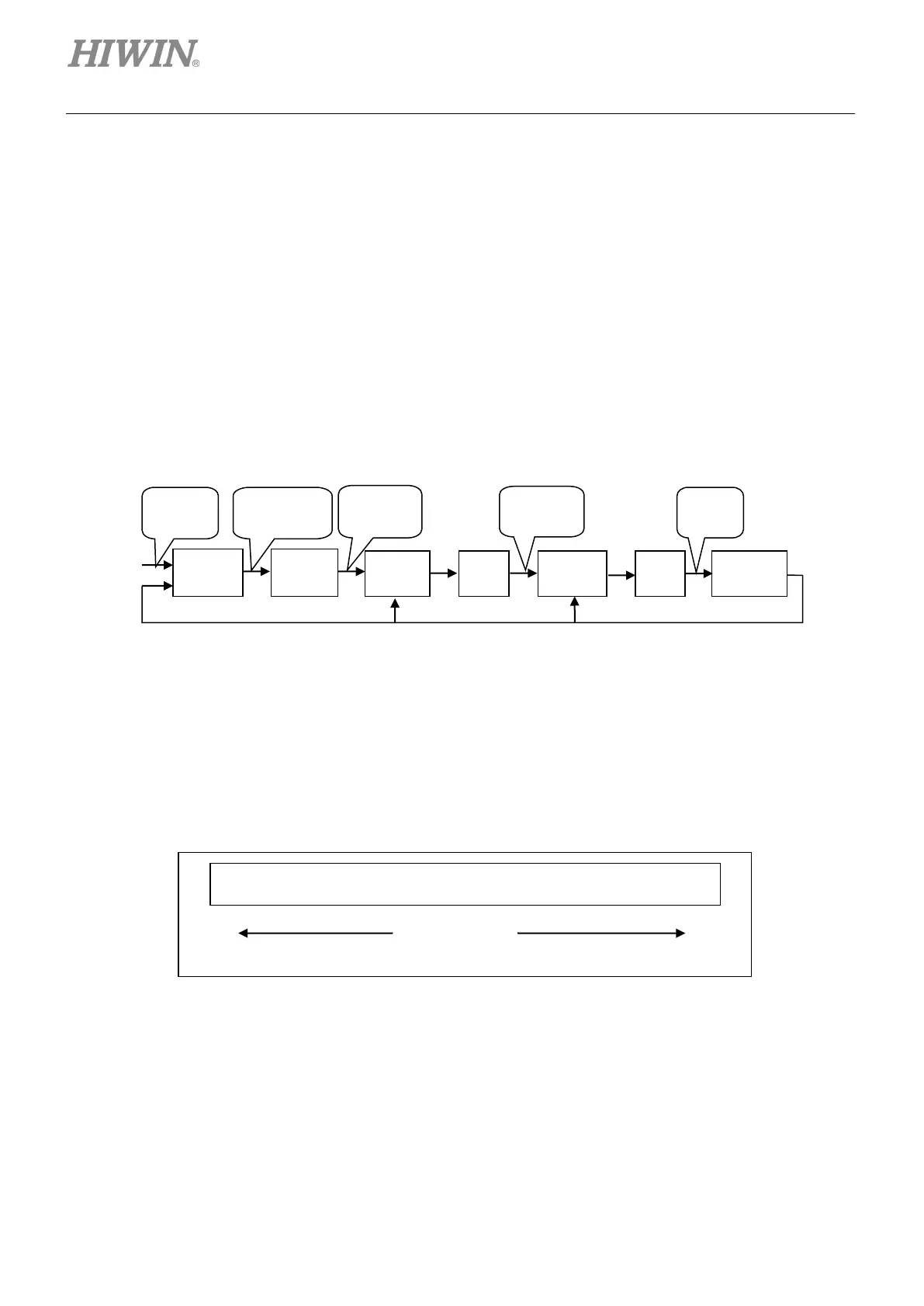
There are three types of control loop for D2 drive: current, velocity, and position control loops to
implement the servo motor control. The architecture of drive’s servo loop is described in figure 3.5.1.
In the position mode, three loops should be connected in sequence to perform the position control for
the motor. In the velocity mode, the velocity loop should use the current loop to drive the motor.
However, in the current mode, the current loop only controls the phase commutation mechanism of
motor, and its command is controlled by the voltage command from the host controller. To simplify
gain parameters of servo loops, D2 drive only uses one common gain (CG) to set and adjust the
overall control-loop architecture.
Figure3.5.1
(2) Servo gains
D2 drive uses one high-speed DSP to implement the motor control. Generally, when the servo loop
is implemented by the digital method, it needs to adjust many servo gains. However, this drive
adopts an ingenious control design to simplify servo gains as one common gain to significantly
improve convenience.
Figure3.5.2
……………………………………
……………………………………
 Loading...
Loading...

