D2 Series Servo Drive User Manual Drive Configuration
HIWIN MIKROSYSTEM CORP. 5-17
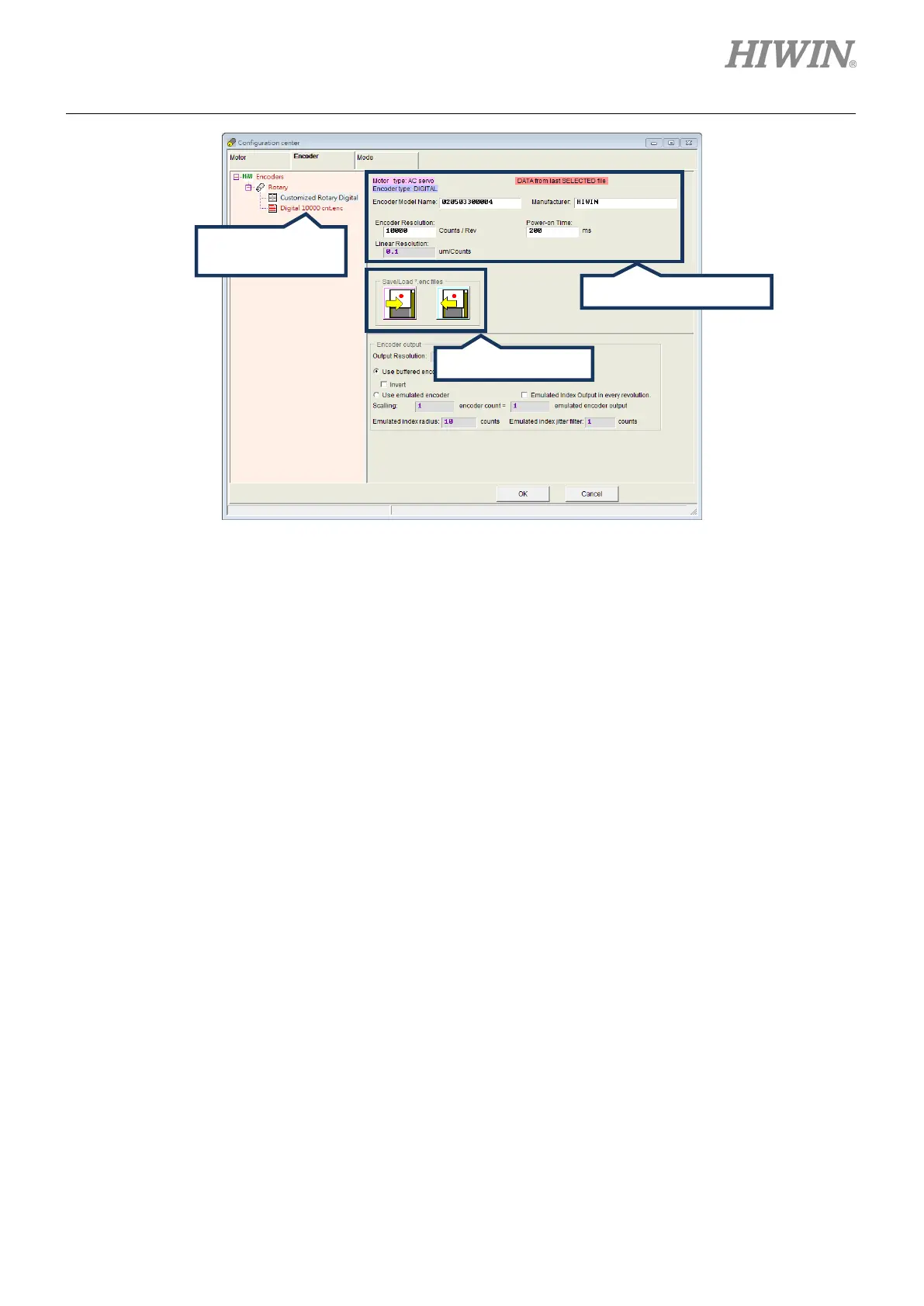
Figure5.2.2.2.1 Encoder configuration page for customized encoder
5.2.2.3 Encoder output setting
D2 drive sends out the encoder signal with the AqB square wave via CN2. It can be connected to the host
controller if needed. Checking “Use buffered encoder” or “Use emulated encoder” in the “Encoder output”
area, as shown in figure 5.2.2.3.1, the value in the “Output Resolution” field will be updated according to
the selected output mode.
Note:
For AC servo motor with the 17-bit encoder, the Z-phase signal can be sent out to the host controller by using the
emulated encoder, as shown in figure 5.2.2.3.4.
(1) Buffered encoder output
When this option is selected, the drive will forward the signal from the motor’s encoder to the host
controller. Moreover, the “Invert” function can be checked if needed. It allows the drive to inverse the
received signal and then send out it. The resolution of output signal is also displayed on the page for
reference.

 Loading...
Loading...
