Drive Tuning D2 Series Servo Drive User Manual
6-26 HIWIN MIKROSYSTEM CORP.
Step 5: Record the maximum of “Reference Acceleration” in the acceleration phase. In the example of
figure6.6.2.2, the maximum of “Reference Acceleration is 950,000 count/s2.
Step 6: Dividing the value obtained in Step 4 by the value obtained in Step 5, Acc feedforward gain =
Command Current/Reference Acceleration = 16/950,000 =1.68421*10
-5
.
Step 7: Enter the result obtained in Step 6 into the “Acc feed forward gain” field, as shown in figure
6.6.2.3.
Figure6.6.2.3 Acceleration feed-forward gain
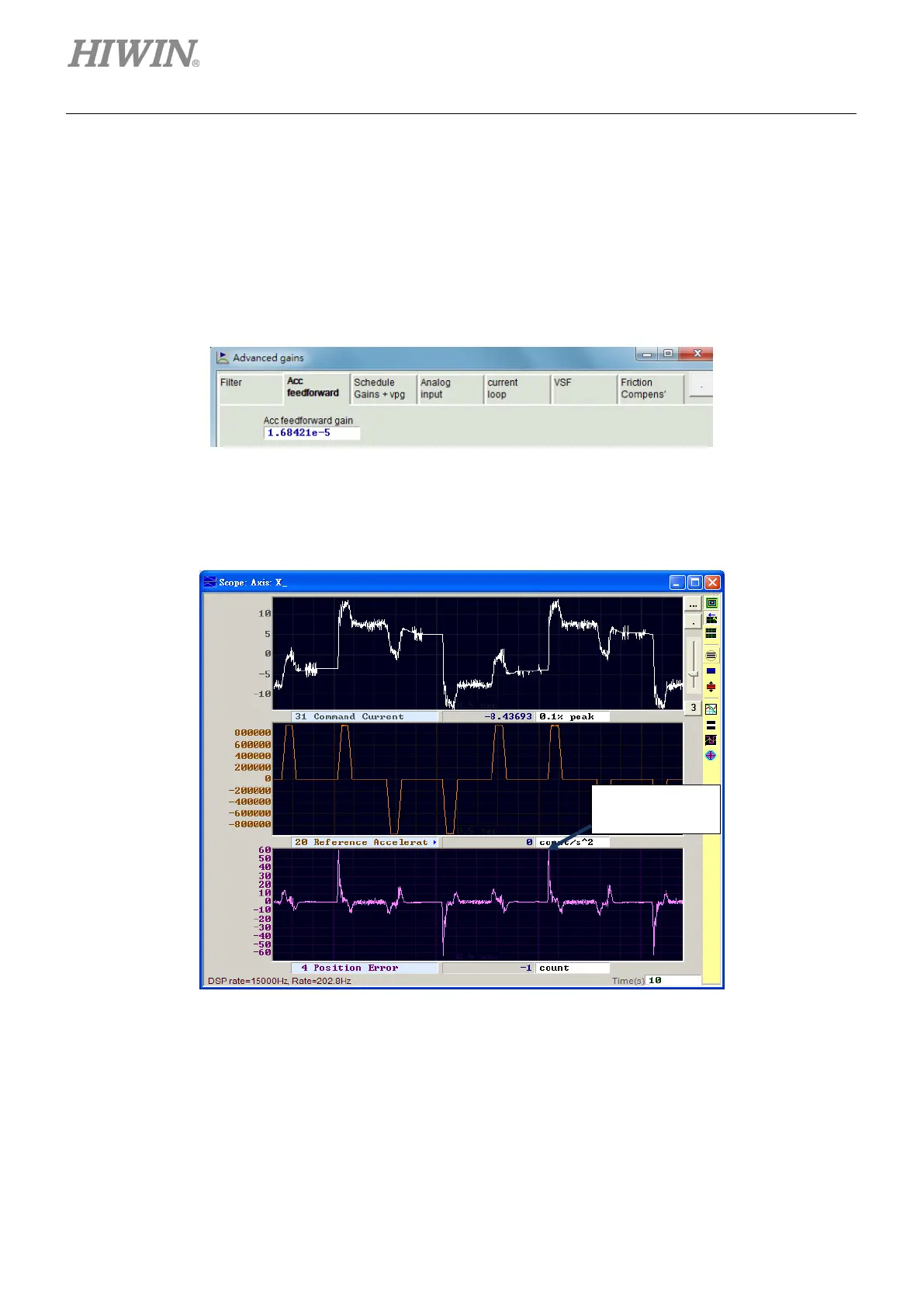
Step 8: Observe whether “Position Error” is reduced. As shown in figure 6.6.2.4, the position error in the
acceleration phase is decreased from 90 counts in figure 6.6.2.2 to 65 counts.
Figure6.6.2.4 Result of adding acceleration feed-forward
“Position Error”
is 65 counts.
 Loading...
Loading...

