Protection Function D2 Series Servo Drive User Manual
8-4 HIWIN MIKROSYSTEM CORP.
Cancel velocity, acceleration, and deceleration limits
In the position mode, when “Smooth factor” is set to 1, it indicates that drive’s limit functions of
speed, acceleration, and deceleration are canceled, and the motor movement completely follows the
path planning based on the pulse commend sent from the host controller. Users can decide whether
to cancel the drive’s limit function based on the requirement.
Applicable scope of emergency stop deceleration
The emergency stop deceleration (“Dec. kill”) will be activated in following cases.
(1) In the position and velocity modes, it is the deceleration when the motor in motion is disabled to
the emergency stop condition.
(2) When executing “P2P” or “Relative move” in the performance center, it is the deceleration after
pressing the “Stop motion” button.
(3) When performing the homing procedure, it is the deceleration after finding the home position.
(4) In the “Jog” operation, it is the deceleration after the “Jog” motion is stopped.
“Dec. kill” is used for the case of requiring a high deceleration. Thus, it is recommended to set “Dec.
kill” based on the maximum capacity of motor. The formula for the rotary motor is described as
follows:
Peak current = min (motor peak current, drive peak current).
Dec. kill = (peak current x torque constant)/load inertia.
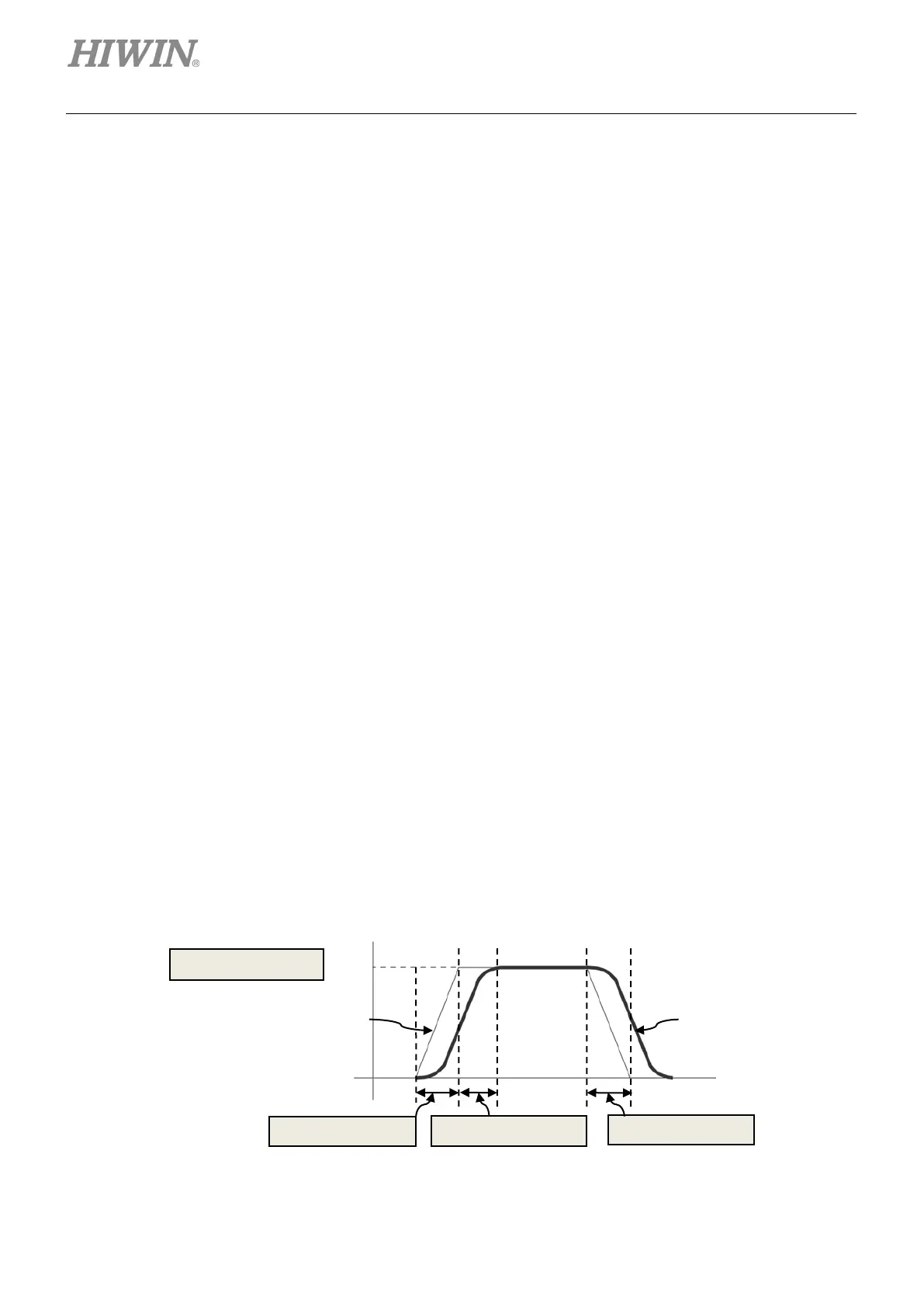
Smooth motion
The function of smooth motion is used to reduce the impact of motor force to the load in the
acceleration/deceleration phase of motion process. This purpose is achieved by setting “Smooth
factor”. This parameter is designed according to the number of samples in the moving average filter,
as shown in figure 8.1.4. The relationship of filter time constant and “Smooth factor” is described as
follows.
(1) Non CoE model: filter time constant = “Smooth factor” × 0.5333 ms;
(2) CoE model: filter time constant = “Smooth factor” × 0.5 ms.
Figure8.1.4
filter
 Loading...
Loading...

