Drive Tuning D2 Series Servo Drive User Manual
6-6 HIWIN MIKROSYSTEM CORP.
(1) V max: The maximum of velocity ripple.
V min: The minimum of velocity ripple.
V avg: The average of velocity ripple.
(2) Velocity Ripple: Velocity ripple.
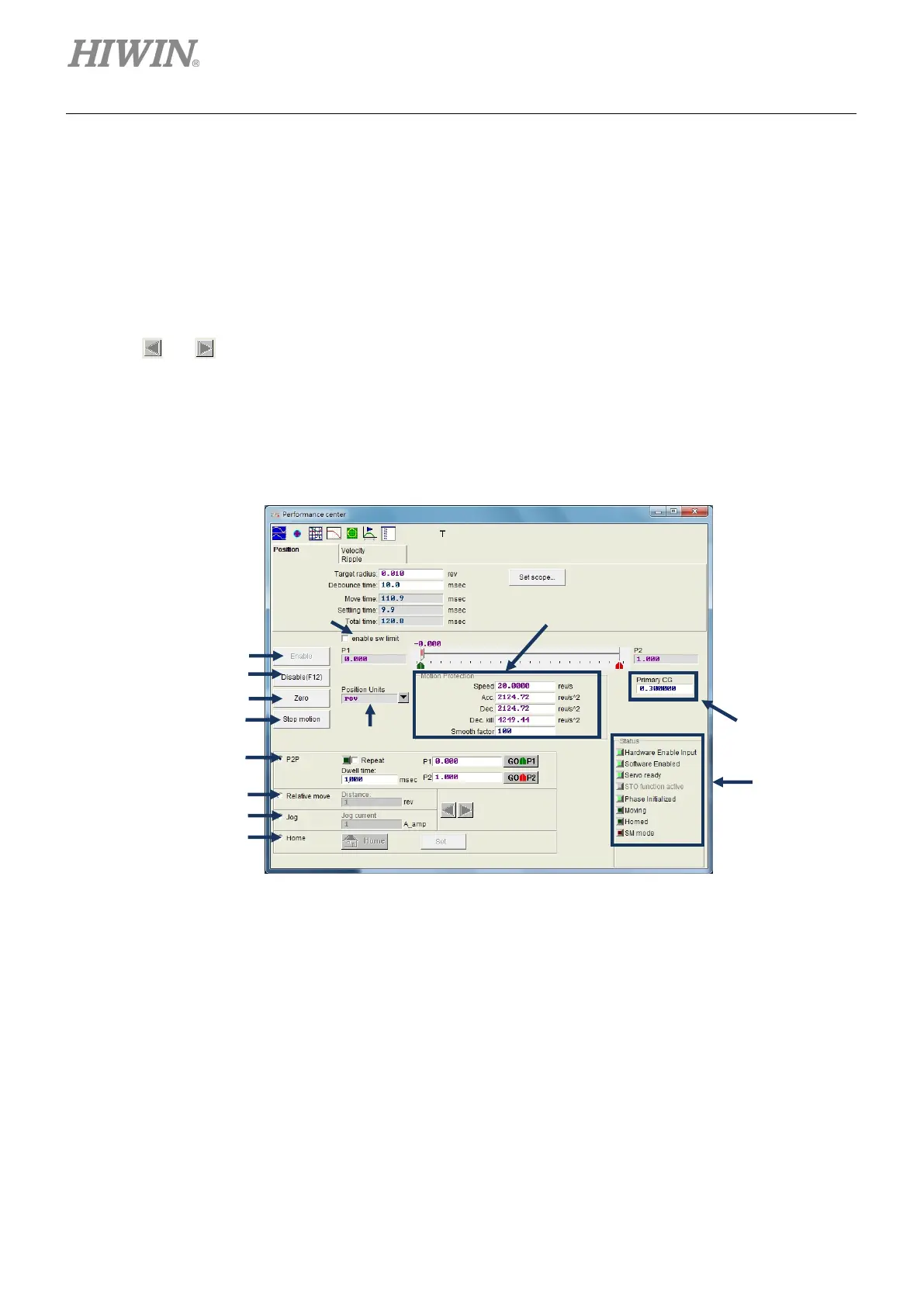
In addition to the P2P function, the relative motion (“Relative move”) can be set to move a distance; while
the continuous motion (“Jog”) can continue moving in the positive or negative direction just by clicking the
button of
or . The speed, acceleration/deceleration, and smooth factor in the “Motion Protection”
area are also used as the function of motion protection. Hence, if these values are forgot to set to the
value of motion protection after the test run is completed, the expected speed or acceleration may not be
reached at receiving the motion command sent from the host controller. Please pay special attention to
this.
Figure6.2.2 Performance center – “Position” tab
(3) Enable: Enable the motor.
(4) Disable: Disable the motor.
(5) Zero: Set the current position to the zero position.
(6) Stop motion: Stop the motor.
(7) Position Units: Unit setting. Set the preferred unit at the operation. This is the same as the unit
setting in “Quick View” on the main window.
(8) Motion Protection: Protection parameters for the motor motion, including the speed, acceleration,
deceleration, emergency stop deceleration, and smooth factor at the test run. Users can use the
smooth factor to plan the path trajectory as an S-type curve or T-type curve. The adjustment range is
1 - 500. The larger the value is, the closer to the S-type curve is; while the smaller the values is, the
○4
○5
○3
○6
○9
○10
○11
○12
○14
○13
○8
○15
 Loading...
Loading...

