— 6-30 —
6.3.4.1. Jogging with Control Input and Output
This section describes procedures to perform a typical jog operation via control inputs and
outputs
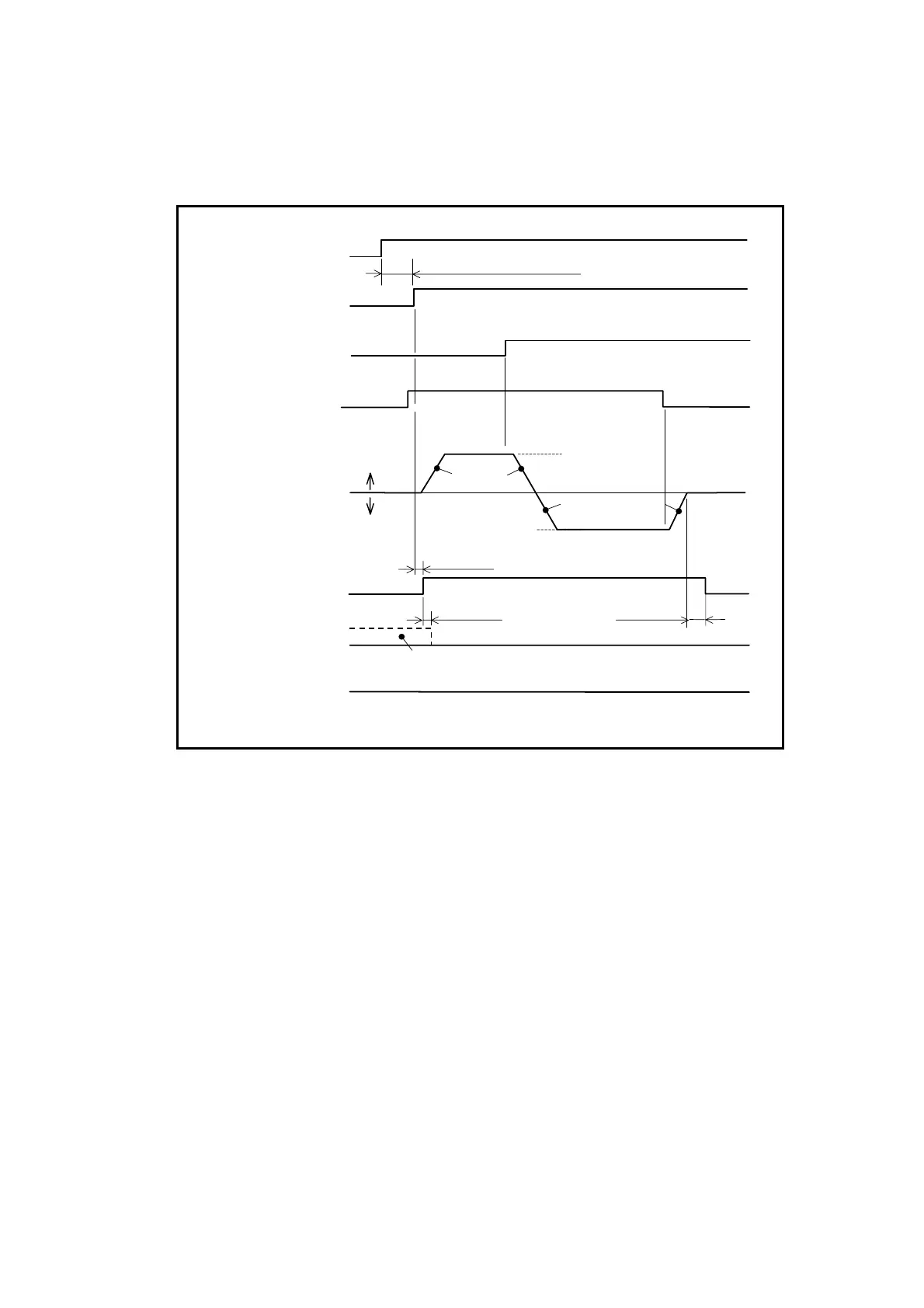
Fig 6-21: Signal timing of a jogging operation via control Inputs and Outputs
Motor motion
Max. 170 ms (Max. 3.2 s max.)
¹
1
ON
OFF
closed
open
SVON input
SVST output
MB
Max. 0.5 ms
Max. 0.5 ms Max. 1 ms
closed
open
BUSY output
closed
open
closed
open
IPOS output
(FW > 0: FIN)
JA
• Closed when the target position is secured.
• Open when the target position is lost.
JV
JV
JB
JA
Speed in the plus direction
(1)
(2)
(5) (8)
DIR input
ON
OFF
(3)
¹
1)
It takes 3.2 seconds to activate the Motor servo for
the first time after turning on the main power.
IPOS output
(FW < 0: CFIN)
(FW = 0: IPOS)
Speed in the minus direction
JOG input
ON
OFF
(4) (7)
(6)
1) Turn on the Motor servo by the input SVON (Servo on).
2) The output SVST (Servo state) closes when the Motor servo is on.
3) Set the jogging direction by the input DIR (Jog direction).
4) Activates the input JOG (Jog).
The Motor starts a motion following the parameter value of JA (Jog acceleration), JB
(Jog deceleration) and JV (Jog velocity).
5) The output BUSY (In-operation) closes when the Motor is jogging and the output
IPOS (In-position) opens.
6) When the input DIR is altered in the middle of jogging, the Motor decelerates and
stops, then the Motor starts in the specified direction.
7) The Motor starts to decelerate when the input JOG is turned OFF.
8) The output BUSY opens at the completion of inputting the internal command for
deceleration. The output IPOS remains open at this time because the jogging started
from the position at where the former positioning operation had completed.
Different from the positioning operation, the output IPOS does not signal the completion of
jogging. Confirm the completion of jogging by the output BUSY.
 Loading...
Loading...



