— 8-18 —
8.3.2.1. Position Error: TEU (Position Error, Under) and TEO (Position Error, Over)
Outputs the condition of position error counter against the thresholds.
The output IPOS (In-position, IPOS mode) focibly opens while inputting a motion command or
the target position is being lost. At the same time, this output only reports compared results
between the position error and the thresholds.
Table 8-17: Parameter related to the outputs TEU and TEO
Parameter
(code)
Function
Initial
setting
Data range Unit
TEU
Position error is under the
threshold.
0 0 to 2 621 439 pulse
TEO
Position error is greater or equal
to the threshold.
0 0 to 2 621 439 pulse
The output TEU closes when the absolute value of position error counter is less or equal to the
setting of the TEU. The TEO closes when the absolute value of position error counter is greater
or equal to the setting of parameter TEO.
Setting of the parameter ST (Stability timer) with the command PO (Edit control output) controls
frequent opening and closing of output port caused by fluctuating position error.
Setting of the parameter ST to the output TEU acts as the following.
◊ The TEO output closes when the position error is less or equal to the setting of parameter
TEU longer than the time set by the parameter ST. It opens when the position error falls,
even momentarily, below the TEU setting.
Setting of the parameter ST to the output TEO acts as the following.
◊ The output TEO closes when the position error is greater or equal to the setting of
parameter TEO longer or equal to the set time by the ST. It opens when the position error
falls, even momentarily, below the TEO setting.
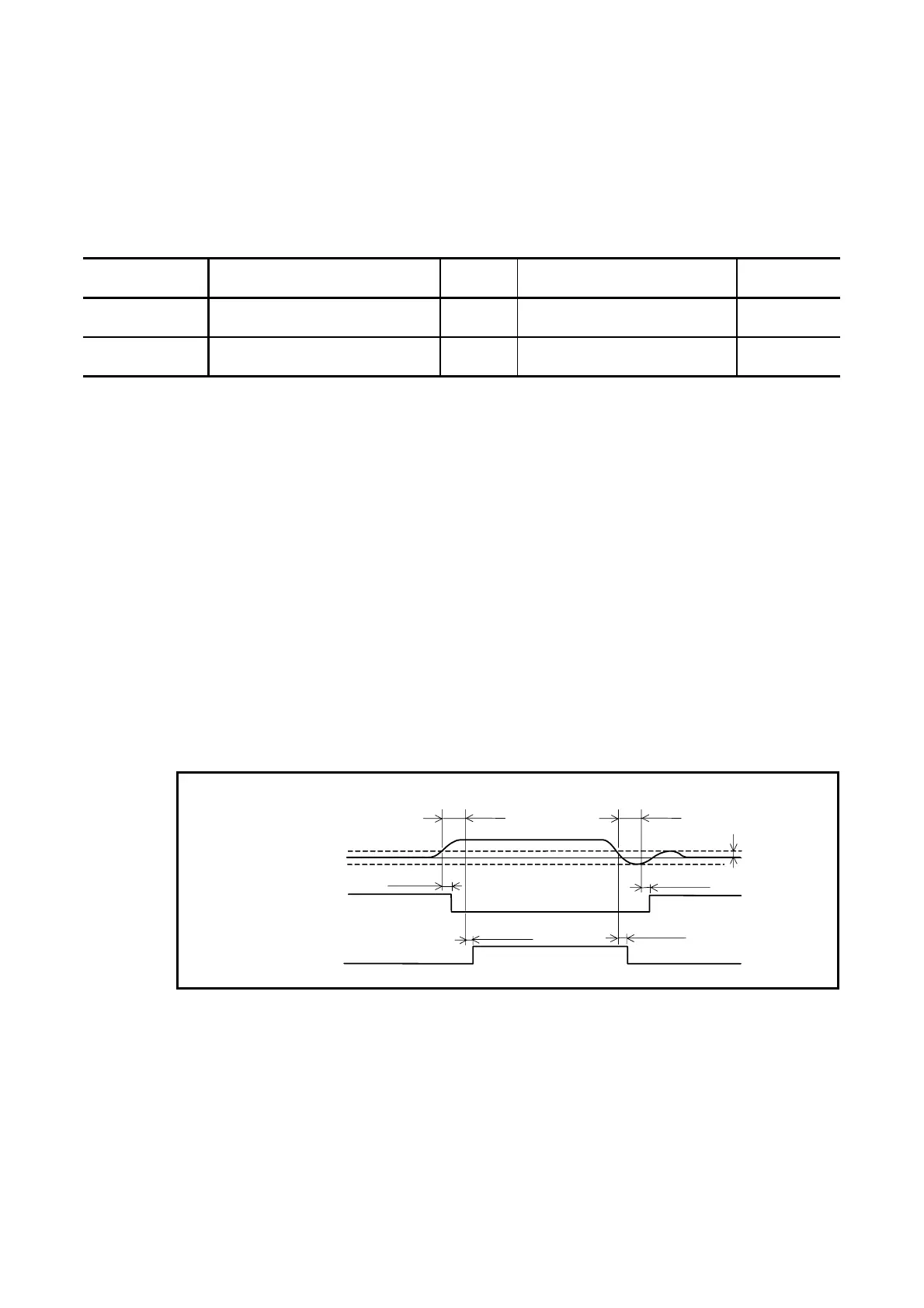
Fig 8-8: Signal timing of the outputs TEU and TEO
Residual pulses of
position error counter
Setting of TEU
and TEO
100 ms
Stability timer
Example: ST100 (100 ms)
Max. 1 ms.
closed
open
Output TEU
closed
open
Max. 1 ms
100 ms
Max. 1 ms
Max. 1 ms .
Output TEO

 Loading...
Loading...


