— 7-18 —
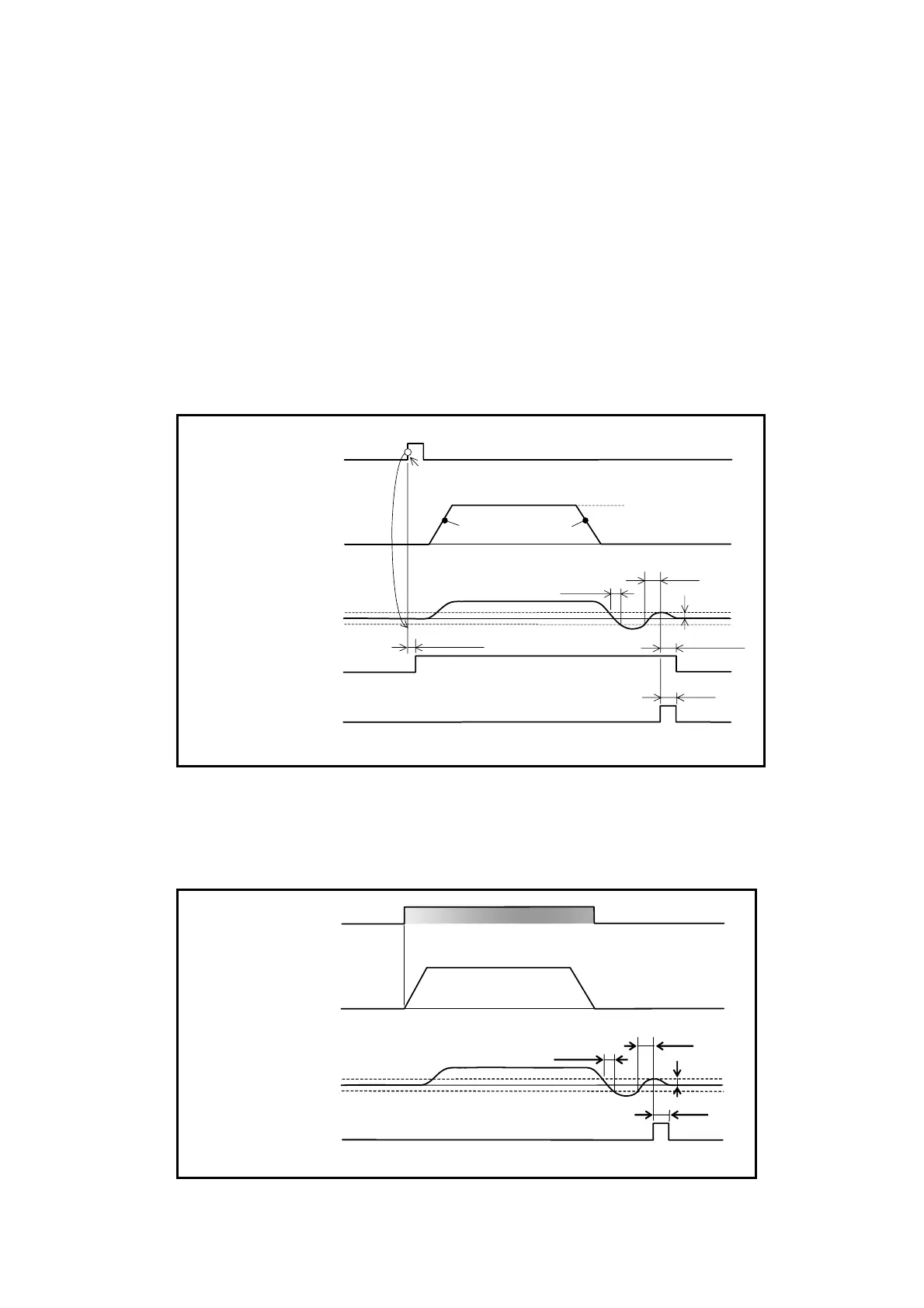
7.2.6.3. FIN Mode (Parameter FW > 0)
The output IPOS reports completion of the operation caused by the positioning command.
The IPOS signal shall be outputted for every positioning start command such as the RUN
command (Program start).
◊ The output opens at least for the time set in the parameter IS (In-position stability
timer) to check stability of positioning; even no internal pulse is outputted.
The System confirms the settling condition when the Motor reaches to the target position. It
closes the output IPOS for a time set in the parameter FW when residual pulses in the error
counter is less or equal to the set value of the parameter IN (In-position limit).
◊ When the next positioning command is outputted while the output IPOS is closed, the
output IPOS opens and the positioning starts.
Fig 7-16: Output IPOS in a positioning under the internal positioning command (FIN mode)
< 100 ms
100 ms
Max. 0.5 ms.
Max. 1 ms
FW setting
Residual pulses in
the error counter
IN setting
Motor motion
Stability timer
Example: IS100 (100 ms)
MV
MB
Input RUN
ON
OFF
closed
open
Output BUSY
closed
open
Output IPOS
(FW >
0: FIN
)
MA
The Motor starts rotating at the rising edge.
The System always confirms completion of positioning every time inputting pulse pauses in the
pulse train command operation. If the intervals of inputting pulses are intermittent, set the
parameter IS longer because the outputting IPOS signal will be unstable.
Fig 7-17: Output IPOS in the pulse train command operation (FIN mode)
< 100 ms
100 ms
FW setting
Residual pulses in
the error counter
IN setting
Motor motion
Stability timer
Example: IS100 (100 ms)
Pulse train input
clsoed
open
Output IPOS
(FW >
0: FIN)

 Loading...
Loading...


