— 7-4 —
7.1.4. Servo on: SVON
This input activates the Motor servo.
Table 7-7: Signal logic of the input SVON
Logic Description
OFF
Servo off
ON
Servo on
The Motor servo activates when the input SVON is turned on after the main power is turned on
and the output DRDY (Driver Unit ready) is closed.
It takes some time to actually activate the Motor servo by the input of SVON.
Check the condition of the Motor servo by the output SVST (Servo state).
◊ 3.2 seconds: For the first activation of the Motor servo after turning on the power.
◊ 170 ms: For the second time and later activation of the Motor servo after turning on the
power.
(The first activation of the Motor servo must be completed.)
When the input SVON is turned off, the Motor gets in the servo off state and stops by the
dynamic brake. At the same time, the errors in the error counter will be cleared.
When the Motor servo has been activated by the input SVON, execution of the command MO
(Motor off) deactivates the Motor servo.
When the Motor servo has been deactivated by the command MO (Motor off), execution of the
command SV (Servo on) activates the Motor servo.
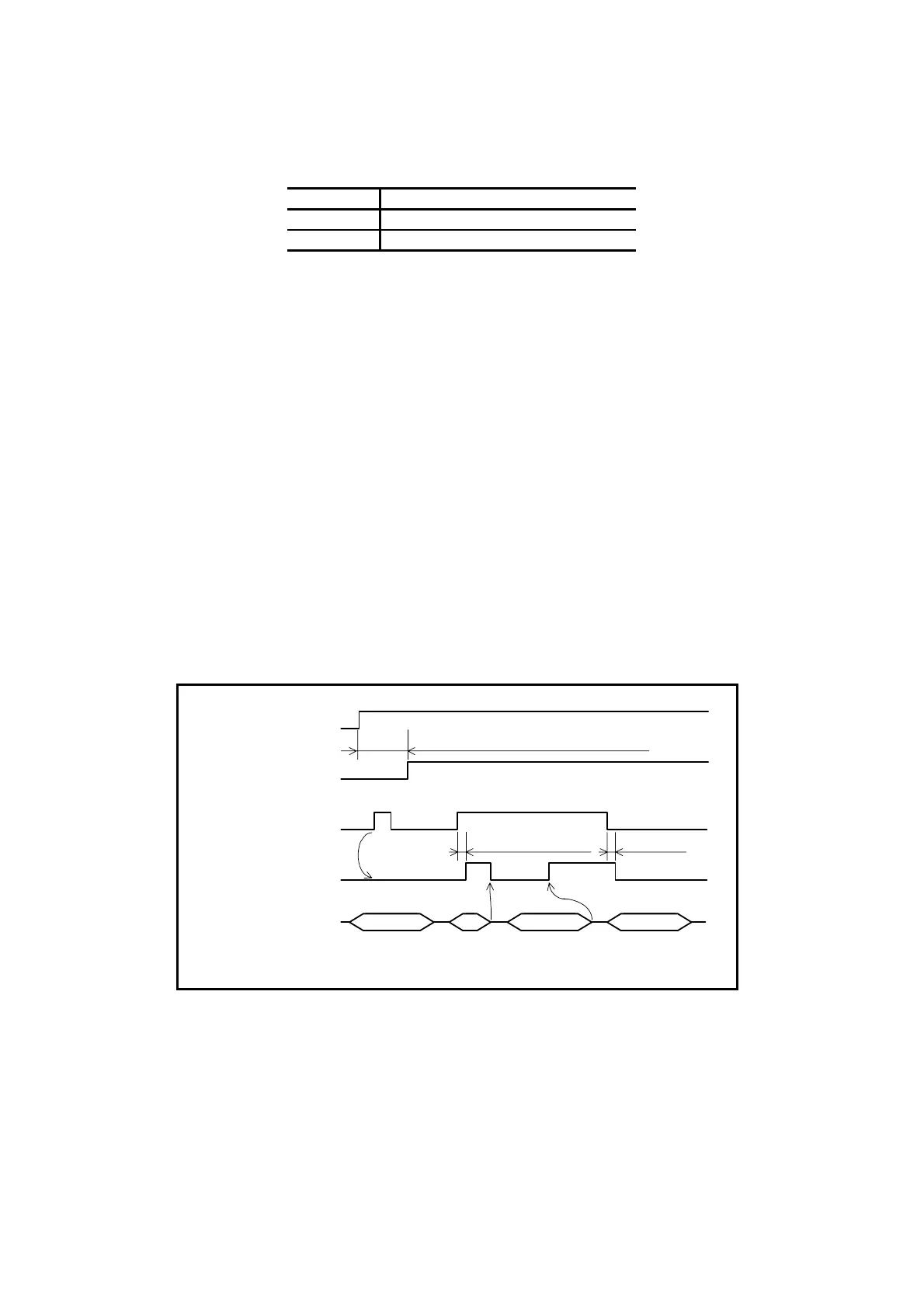
Fig 7-4: Signal timing of the input SVON
Initializing time of CPU (apploximately 3 seconds)
Max. 170ms (Max. 3.2 s)
¹
1
invalid
closed
open
closed
open
on
off
Power
Output DRDY
Input SVON
Output SVST
(servo state)
RS-232C
communication
ON
OFF
SV MO SV SV
Max. 1ms
¹
1:It takes 3.2 seconds to activate the Motor servo for the
first time after
turning on the power.

 Loading...
Loading...


