— 11-19 —
11.3.20. Alarm F4: Emergency Stop
This alarm does not report a problem of the Motor System. This alarm is the input signal for
emergency stop to the Driver Unit from the user device side.
◊ During the state of emergency stop, the Motor servo is off and the dynamic brake
functions to stop the Motor motion.
◊ Deactivation of the emergency stop input clears this alarm.
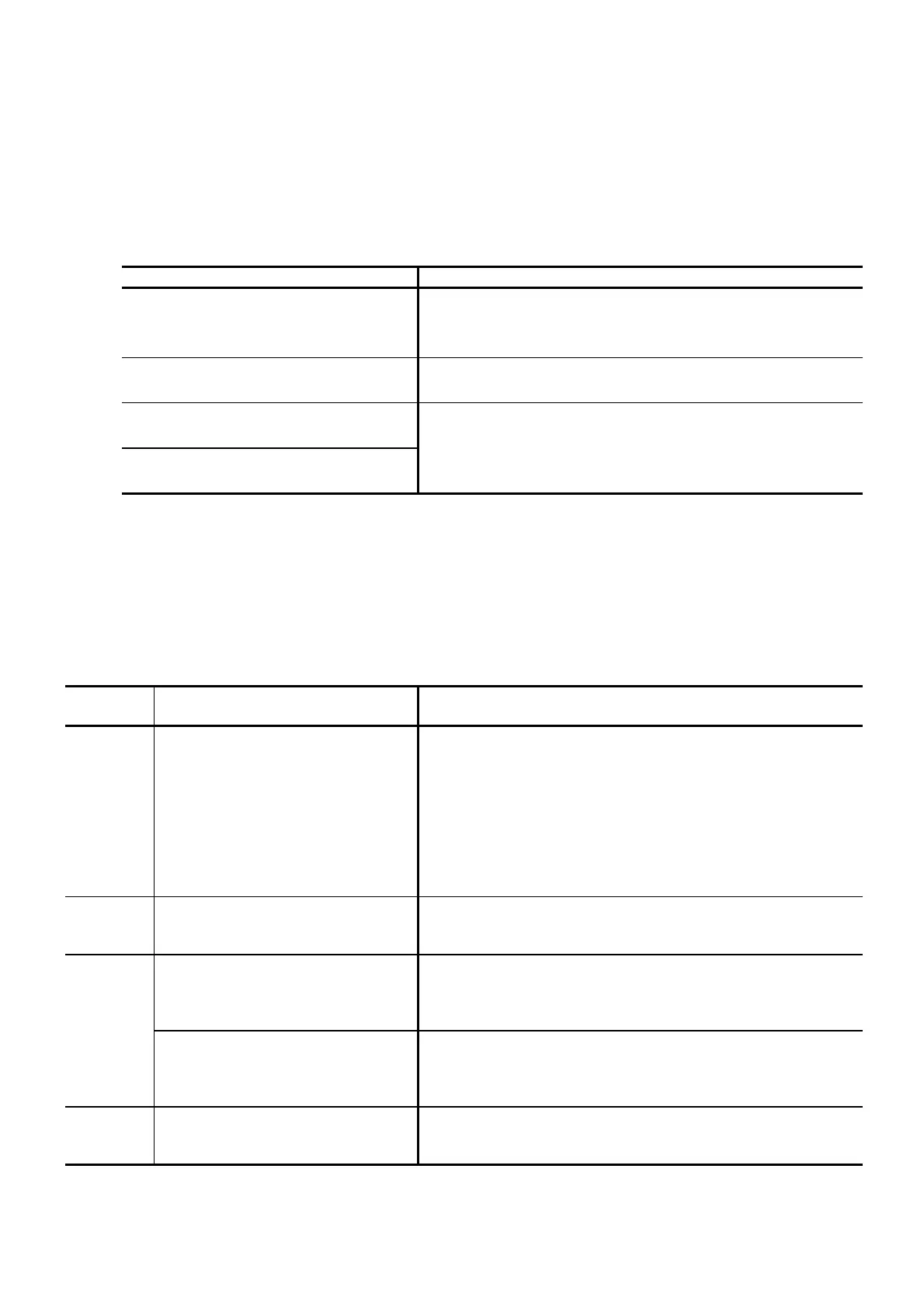
Table 11-29: Casue and remedy for the alarm F4
Cause Remedy
(1)
Wrong setting of the input EMST
signal port polarity.
• The shipping set of the input EMST port is normally closed
contact. If the port is not connected the alarm occurs.
Refer to “3.4.3. Polarity Setting (Normally Open Contact and
Normally Closed Contact”.
(2)
EMST signal is inputted. • Take measures against the problem, and then clear the EMST input.
(3)
Defective wiring
(4)
Defective EMST switch
• Check wiring between the input EMST to the Emergency .Stop
switch.
• Check the Emergency Stop switch itself.
11.3.21. Warning F5: Program Error
The program positioning operation is one of the positioning operations available for the EDC
Driver unit.
This warning occurs when the start and execution of the program specified by the user are not
properly performed.
◊ The command TA/HI identifies the cause.
Table 11-30: Cause and remedy for the warning F5
Alarm
history
Cause Remedy
F5 – 0
The System is executing other
program.
• The input RUN (Program start) is disabled while the output BUSY
(In-operation) is closed.
• When a mechanical contact is used for the input RUN, check for
chattering that may cause two or more rising signals.
• Check if the input RUN is already ON due to noise.
• If the warning occurs due to causes above, increase the setting of
the parameter NW (Anti-chattering timer) of the port which is
assigned to the input RUN (Shipping set: PI5) referring to “8.1.3.1.
Edit of Control Input Function”.
F5 – 1
There is no command is set in the
specified channel.
• Confirm if the selection of the program channel is right.
• Check if one of the input PRG0 to PRG7 is settled 1 [ms] before an
input of the RUN signal.
A command that cannot be carried
out in the current condition is
involved in the channel program.
• For example, the Motor servo must be activated in case of a
positioning command to accept the input RUN.
• Refer to “9.2. Details of Command and Parameter” for conditions
to execute each command.
F5 – 2
A data that is out of specification is
set in the channel program.
• For example, the warning F5 occurs if the positioning command
AQ6 is set to the program even the parameter QR (Dividing
number, user scale) is set to QR4 in a positioning operation with
user unit.
F5 – 3
The input STP is ON, or an alarm or
a warning that prohibits execution of
the channel program.
• Confirm if the Input STP (Stop) is OFF.
• Confirm if an alarm or a warning is occurring.
(1) The input ACLR (Alarm clear) or the command CL (Clear alarm) clears the warning.

 Loading...
Loading...


