— 8-14 —
8.2.3. Integration OFF: IOFF
The input controls the effect of integral control (Motor settling motion) and lowers the
proportional gain in the velocity loop.
This input is used when the integral control becomes unnecessary due to interruption by external
devices.
Table 8-10:Signal logic of the input IOFF
Logic Description
OFF
Do nothing.
ON
Lowers the effects of integral control and the
velocity loop proportional gain
When the input IOFF activates, the effect of integral control is controlled to the set ratio by the
parameter LB (Observer limiter). Also the parameter LG (Lower gain) lowers the velocity loop
proportional gain to the specified ratio.
◊ For example, the integral control effect becomes 0% if the parameter LB is set to
LB0.0, as soon as the input IOFF activates.
◊ The lowering gain function does not work for the command AT (Auto tuning).
Table 8-11: Parameter rlated to the input IOFF
Parameter Name/Function
Initial
setting
Data range Unit
LG
Lower gain
• Lowering ratio of velocity loop
proportional gain
50.00 0.00 to 100.00 %
LB
Observer limiter 0.00 0.00 to 100.00 %
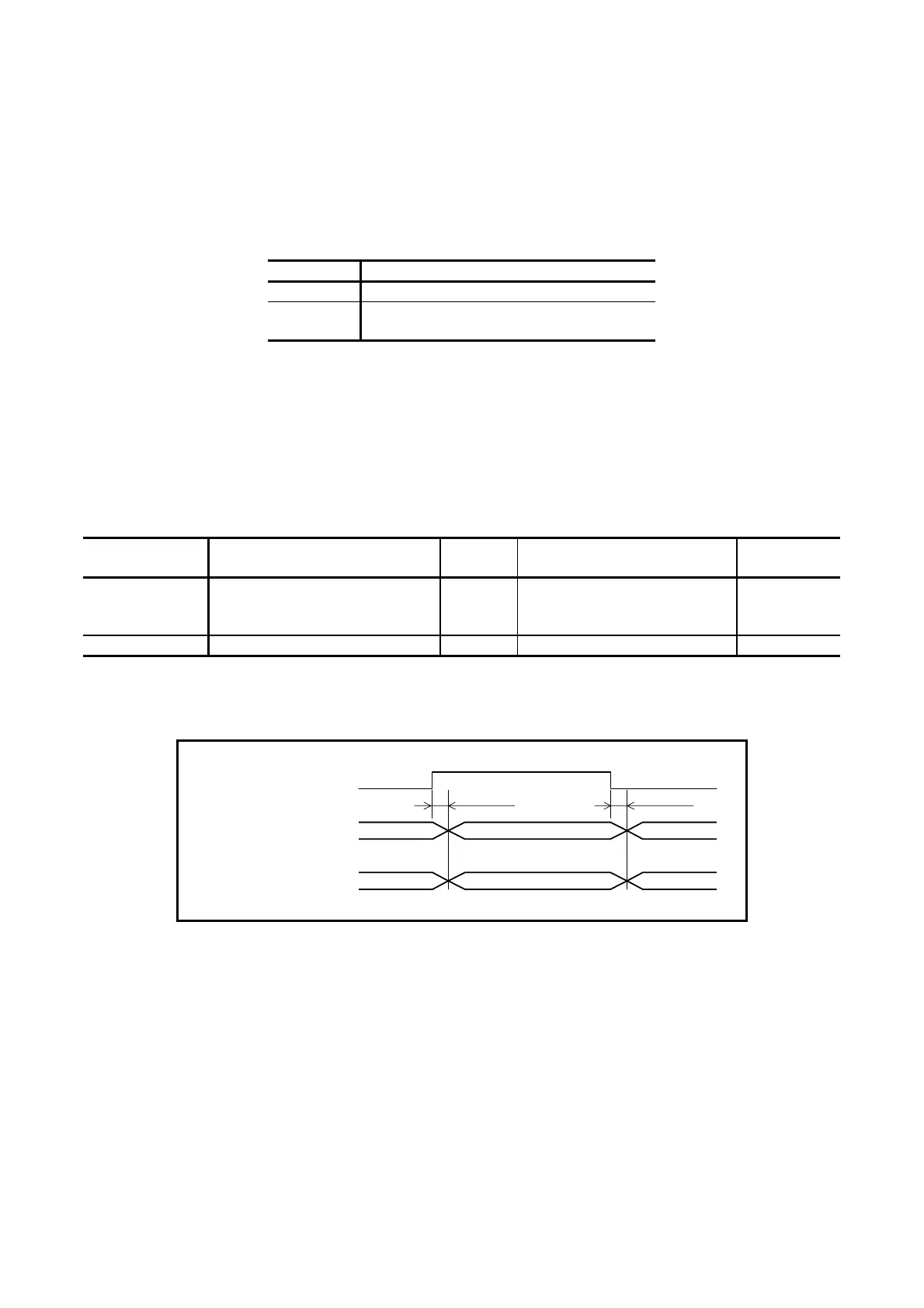
Fig 8-5: Signal timing of the input IOFF
ON
OFF
Input IOFF
VG × LG [%]
VG
Max. 1 ms.
Limited to LB 100 [%] 100 [%] 100 [%]
VG
Max. 1 ms
Output observer limiter
Velocity loop
proportional gain
 Loading...
Loading...



