— 8-17 —
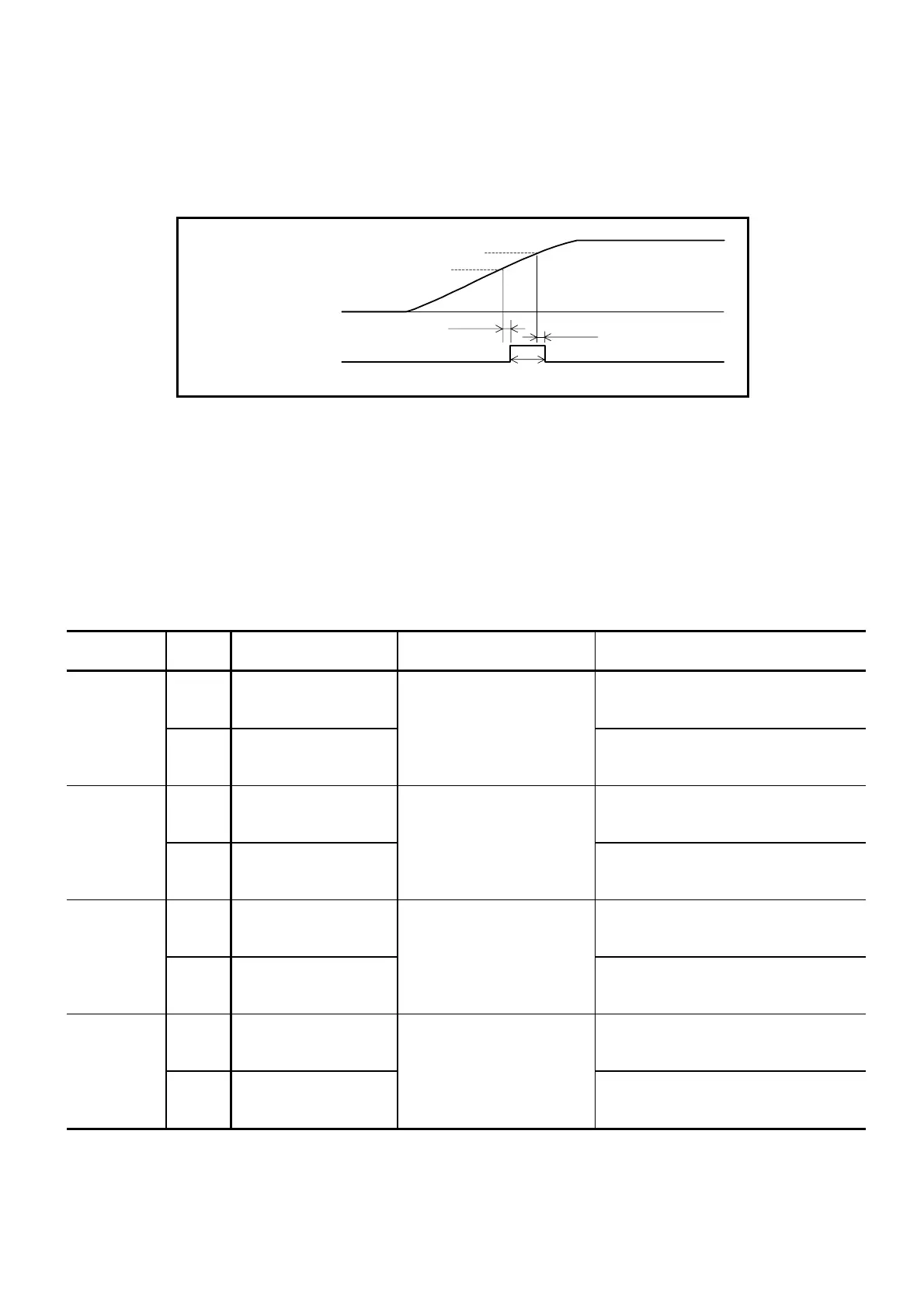
The output closes when the Motor position data is in the set zone.
◊ When the Motor passes the zone with high speed or when the zone is too narrow, the
zone passage time gets short. The parameter ZAW (Zone passage stability timer) is
available to set the minimum time width for detecting the passage.
Fig 8-7: Example: Signal timing of the output ZONEA
closed
open
Motor position data
Output ZONEA
Max. 1 ms .
Parameter ZAW
Max. 1 m
Parameter ZAS
Parameter ZAE
The outputs ZONE (In-zone) do not function in the middle of Home Return.
8.3.2. Outputs of Operating Conditions
The outputs report the Motor conditions against the thresholds.
The table below lists available outputs.
Table 8-16: Ouputs for Motor conditions
Output
objective
Signal
code
Signal name Function Logic (In case of positive logic)
TEU
Tell position error,
under
Open: Not activated,
Closed: Position error is less or equal to
the setting of parameter TEU.
Position
error
TEO
Tell position error, over
Reports the condition of
position error
Open: not activated.
Closed: Position error is greater or equal
to the setting of parameter TEO.
TVU
Tell velocity, under
Open; Not activated.
Closed: Current position is less or equal
to the setting of parameter TVU.
Velocity
TVO
Tell velocity. over
Reports the condition of
current velocity.
Open: Not activated.
Closed: Current position is greater or
equal to the setting of parameter TVO.
TTU
Tell torque command,
under
Open: Not activated.
Closed: Torque command is less or equal
to the setting of parameter TTU.
Torque
command
TTO
Tell torque command,
over
Reports the condition of
torque command.
Not activated.
Closed: Torque command is greater or
equal to the setting of parameter TTO.
TJU
Tell thermal loading,
under
Open: Not activated.
Closed: Thermal loading is less or equal
to the setting of parameter TJU.
Thermal
loading
TJO
Tell thermal loading,
over
Reports the condition of
thermal loading.
Open: Not activated.
Closed: Thermal loading is greater or
equal to the setting of parameter TJO.

 Loading...
Loading...


