— 11-16 —
11.3.17. Warning F1: Excess Position Error
The position error means the difference between the position command to the Motor and the
current Motor position. (You can monitor the position error by the monitor TE/RP (Tell position
error counter). This warning occurs when the absolute value of position error is greater or equal
to the threshold of parameter CO (Position error counter over limit).
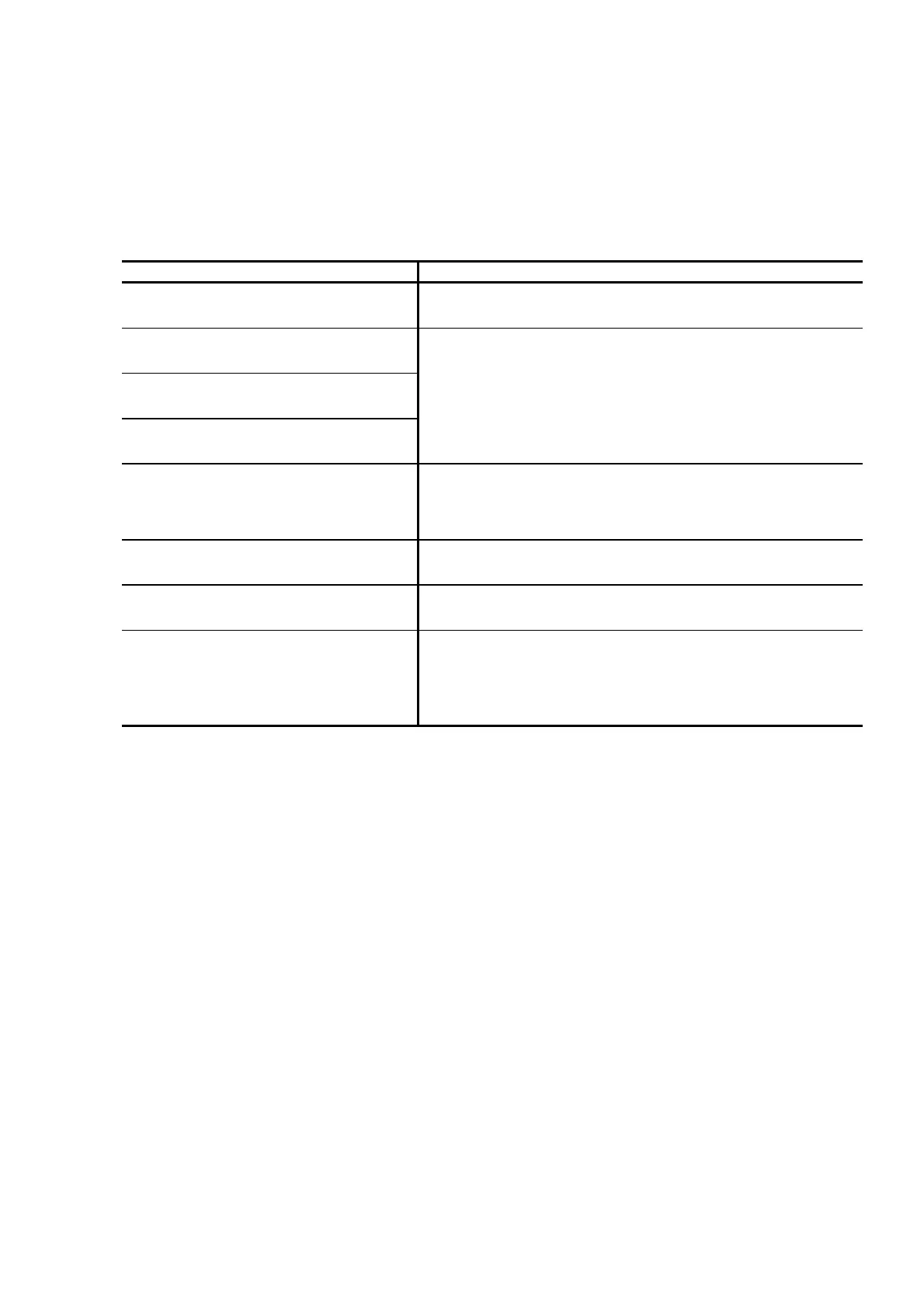
Table 11-24: Cause and remedy for the warning F1
Cause Remedy
(1)
The motor does not respond to the
motion command.
• Confirm the combination of the Motor and the Driver Unit.
(2) Excessive load
(3) Interference of mechanical clump
(4)
Excessive acceleration and
deceleration
• Check for mechanical restraint that causes high friction resistance
or lock of the Motor.
• Reduce settings of parameters fro acceleration and deceleration.
parameters. (In case of pulse train command operation, reduce the
parameter settings of acceleration and deceleration to the pulse
generating controller.)
(5) The setting of CO data is too low.
• Firstly, check if the shipping set of CO200000 is maintained.
(The parameter CO isn’t necessarily to be 200000. It is rather set to
the specifications of machine into which the Megatorque Motor
System is to be incorporated.)
(6) Poor tuning of servo parameters. • Tune the servo parameters referring to “5. Tuning”,
(7) The Motor is out of control. • Confirm the combination of the Motor and the Driver Unit.
(8)
Defective cable, Motor, or Driver
Unit.
• Follow “Appendix 2: How to Check Motor Condition.” Replace the
cable and/or the Motor if necessary.
If above procedure does not work, the Driver Unit may be
defective. Replace it referring to “Appendix 4: Procedure for
Replacing the EDC Driver Unit”.
(1) The input ACLR (alarm clear) or the command CL (Clear alarm) will clear the warning.
 Loading...
Loading...



